Driving in action
Getting from sensory inputs to car control goes either through a modular stack (perception > localization > forecast > planning > actuation) or, more radically, through a single end-to-end model. We work on both strategies, more specificaly on action forecasting, automatic interpretation of decisions taken by a driving system, and reinforcement / imitation learning for end-to-end systems (as in RL work at CVPR’20).
Publications
UniTraj: A Unified Framework for Scalable Vehicle Trajectory Prediction
Lan Feng, Mohammadhossein Bahari, Kaouther Messaoud Ben Amor, Éloi Zablocki, Matthieu Cord, Alexandre Alahi
European Conference on Computer Vision, 2024
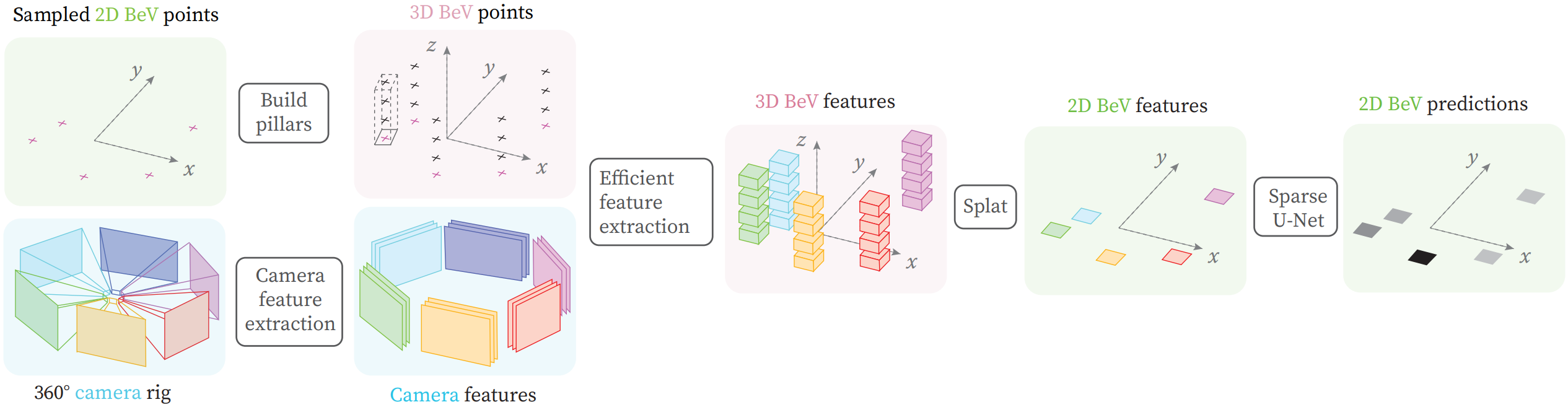
PointBeV: A Sparse Approach to BeV Predictions
Loïck Chambon, Éloi Zablocki, Mickaël Chen, Florent Bartoccioni, Patrick Pérez, Matthieu Cord
Computer Vision and Pattern Recognition (CVPR), 2024
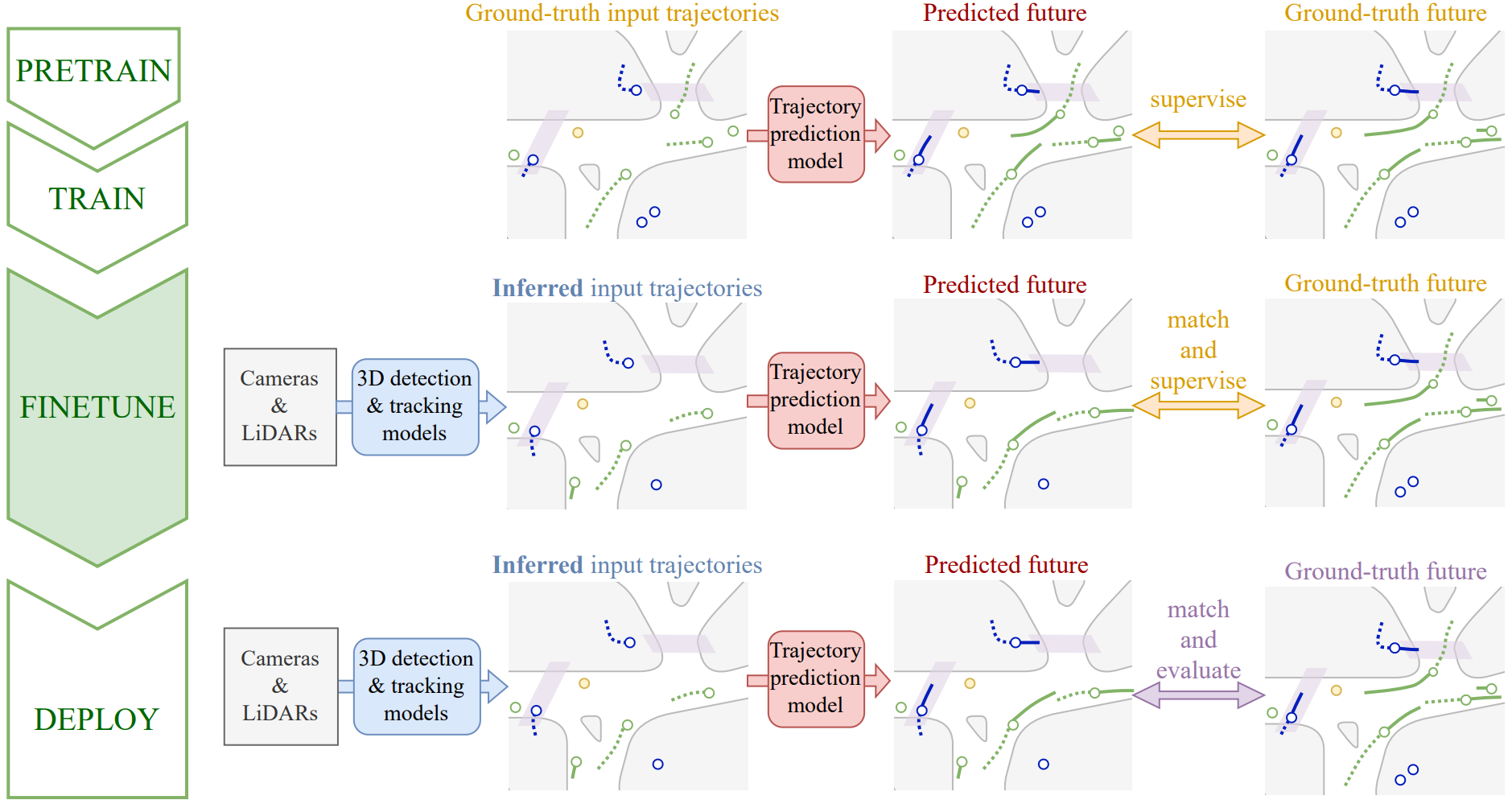
Valeo4Cast: A Modular Approach to End-to-End Forecasting
Yihong Xu, Éloi Zablocki, Alexandre Boulch, Gilles Puy, Mickael Chen, Florent Bartoccioni, Nermin Samet, Oriane Siméoni, Spyros Gidaris, Tuan-Hung Vu, Andrei Bursuc, Eduardo Valle, Renaud Marlet, Matthieu Cord
Winning solution to the "Unified Detection, Tracking and Forecasting" Argoverse 2 challenge @CVPR Worshop on Autonomous Driving (WAD), 2024
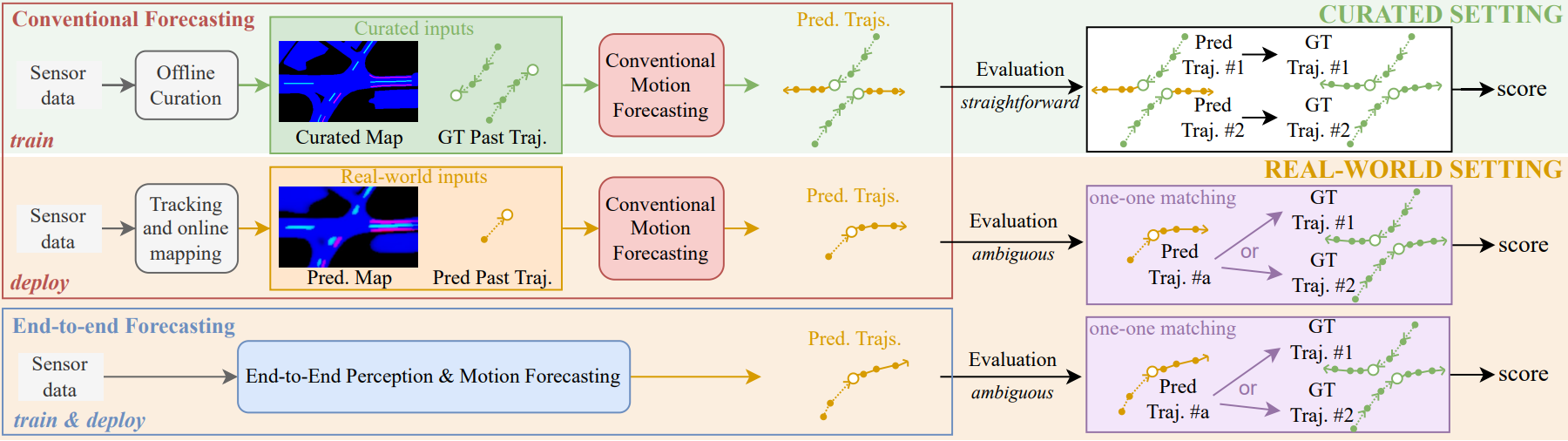
Towards Motion Forecasting with Real-World Perception Inputs: Are End-to-End Approaches Competitive?
Yihong Xu, Loïck Chambon, Éloi Zablocki, Mickaël Chen, Alexandre Alahi, Matthieu Cord, Patrick Pérez
IEEE International Conference on Robotics and Automation (ICRA), 2024
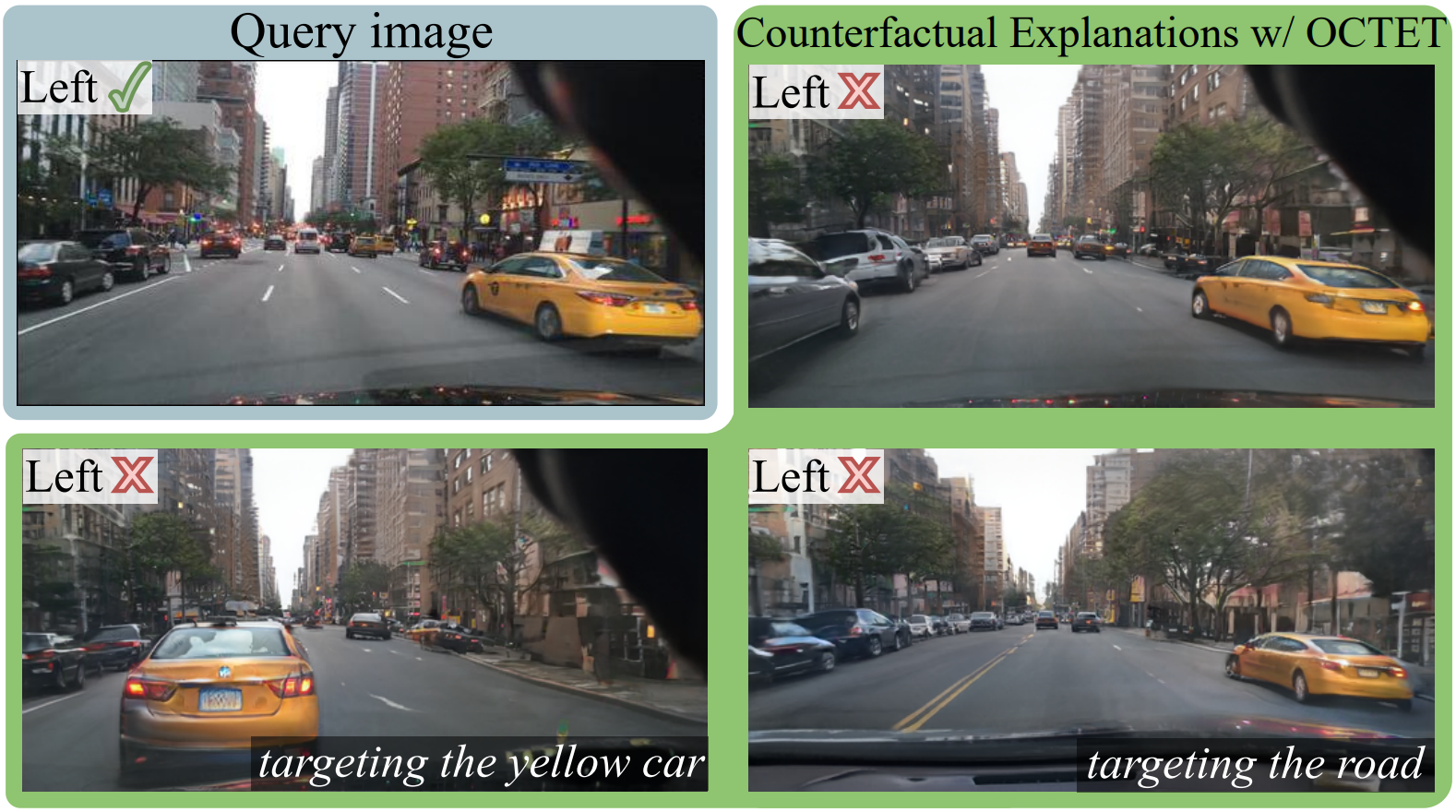
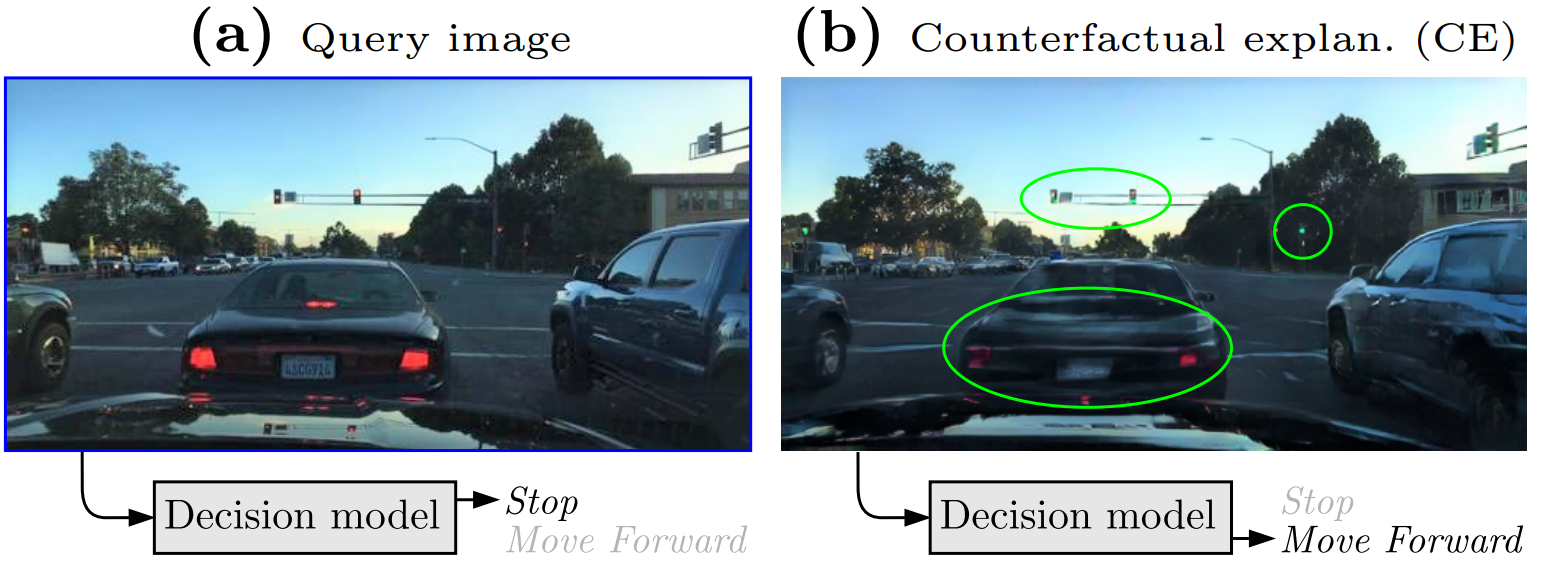
OCTET: Object-aware Counterfactual Explanations
Mehdi Zemni, Mickaël Chen, Éloi Zablocki, Hédi Ben-Younes, Patrick Pérez, Matthieu Cord
Computer Vision and Pattern Recognition (CVPR), 2023
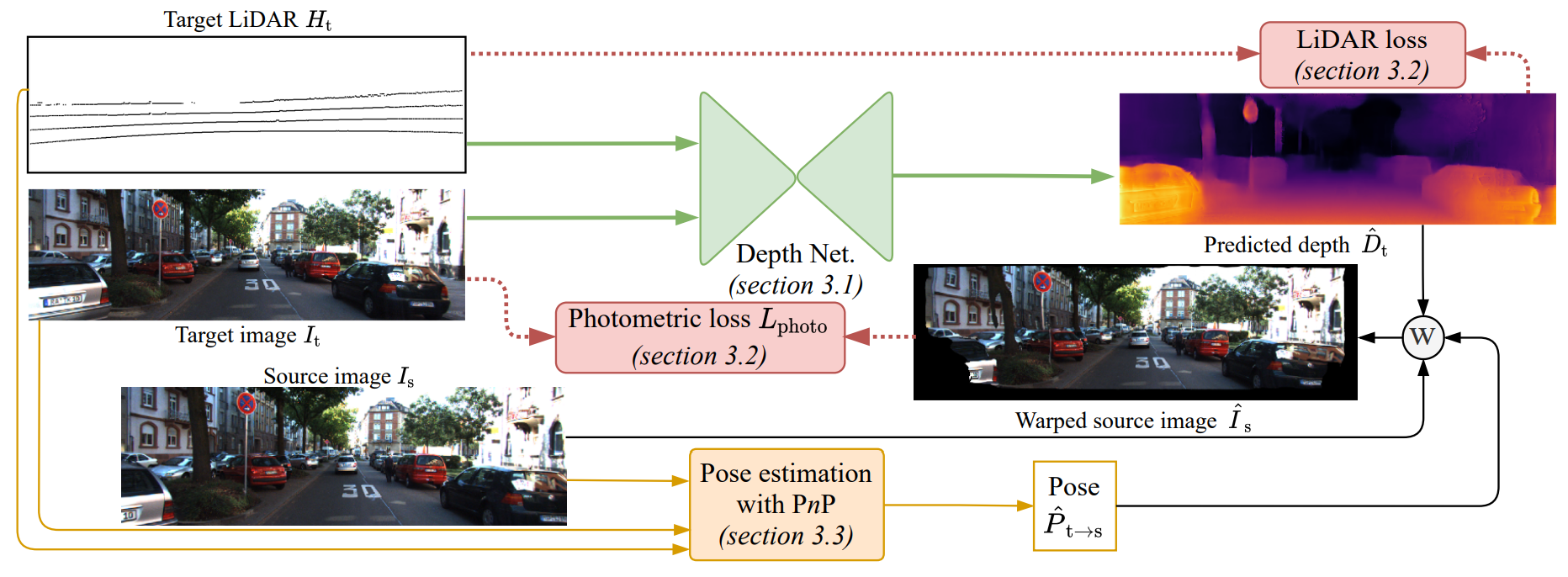
LiDARTouch: Monocular metric depth estimation with a few-beam LiDAR
Florent Bartoccioni, Éloi Zablocki, Patrick Pérez, Matthieu Cord, Karteek Alahari
Computer Vision and Image Understanding (CVIU), 2022
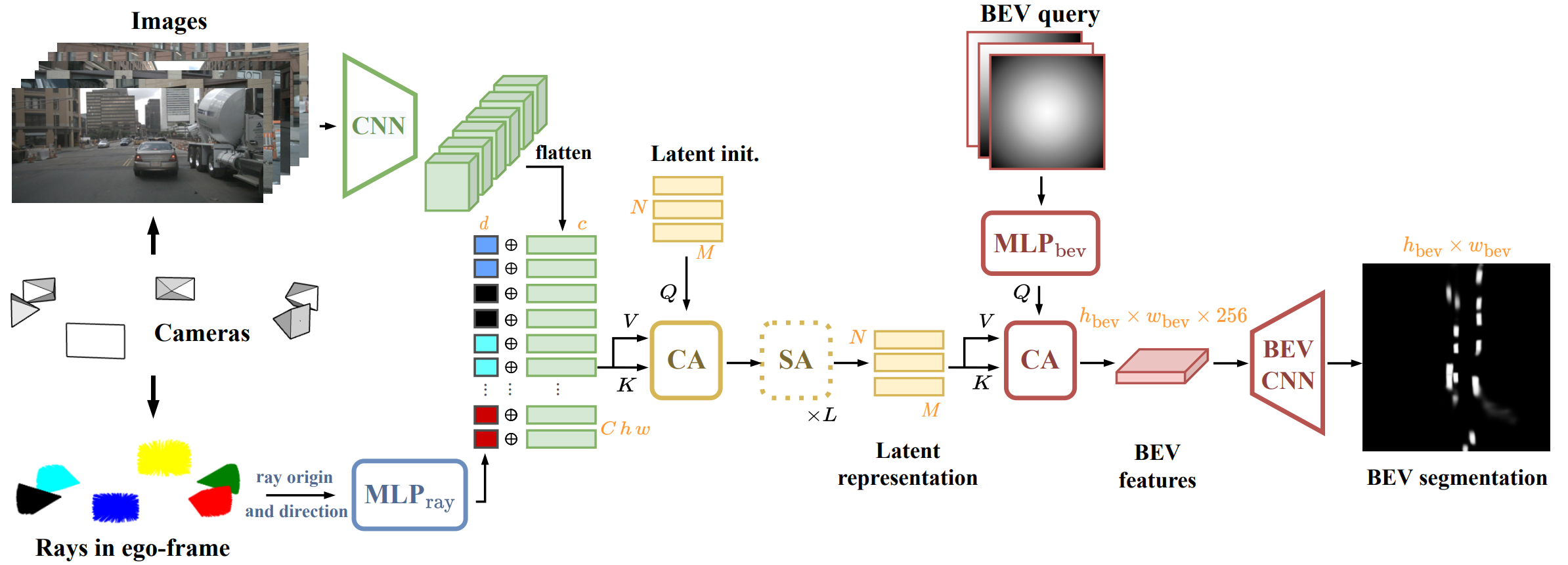
LaRa: Latents and Rays for Multi-Camera Bird's-Eye-View Semantic Segmentation
Florent Bartoccioni, Éloi Zablocki, Andrei Bursuc, Patrick Pérez, Matthieu Cord, Karteek Alahari
Conference on Robot Learning, 2022
STEEX: Steering Counterfactual Explanations with Semantics
Paul Jacob, Éloi Zablocki, Hédi Ben-Younes, Mickaël Chen, Patrick Pérez, Matthieu Cord
European Conference on Computer Vision, 2022
Explainability of deep vision-based autonomous driving systems: Review and challenges
Éloi Zablocki*, Hédi Ben-Younes*, Patrick Pérez, Matthieu Cord
International Journal of Computer Vision, 2022
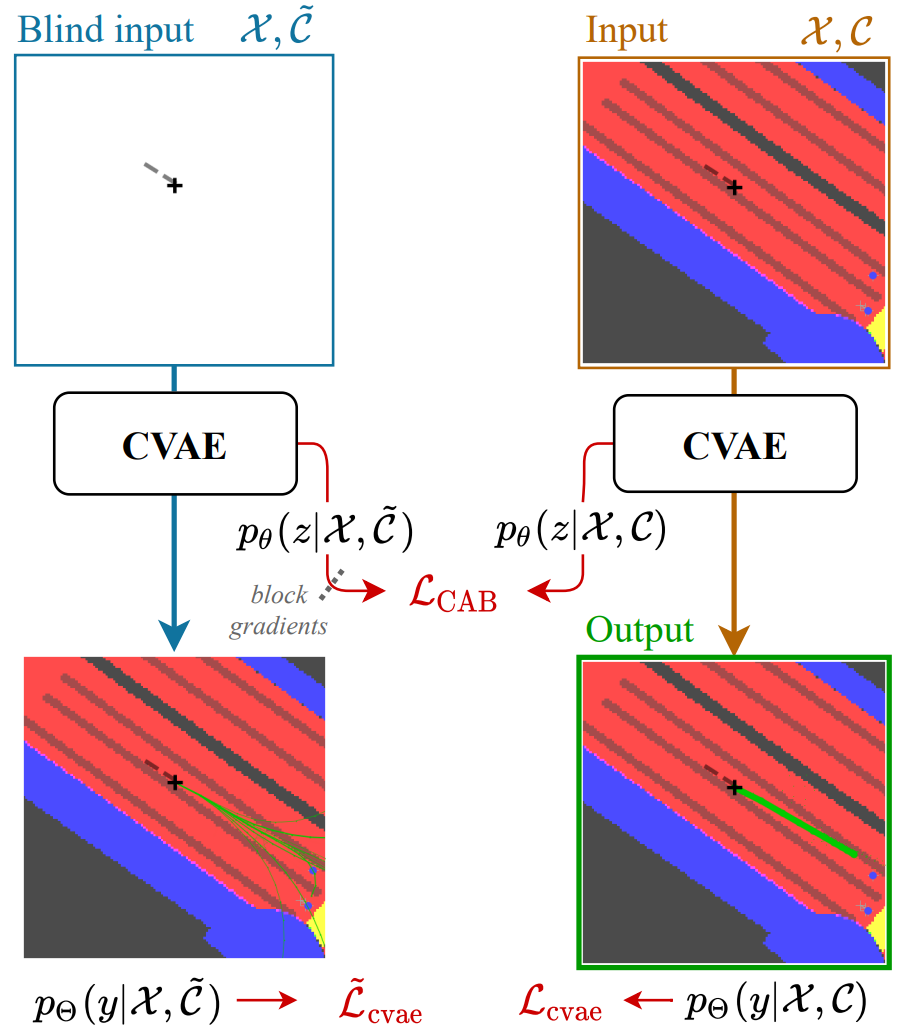
Raising context awareness in motion forecasting
Hédi Ben-Younes*, Éloi Zablocki*, Mickaël Chen, Patrick Pérez, Matthieu Cord
Computer Vision and Pattern Recognition (CVPR) Workshop, 2022
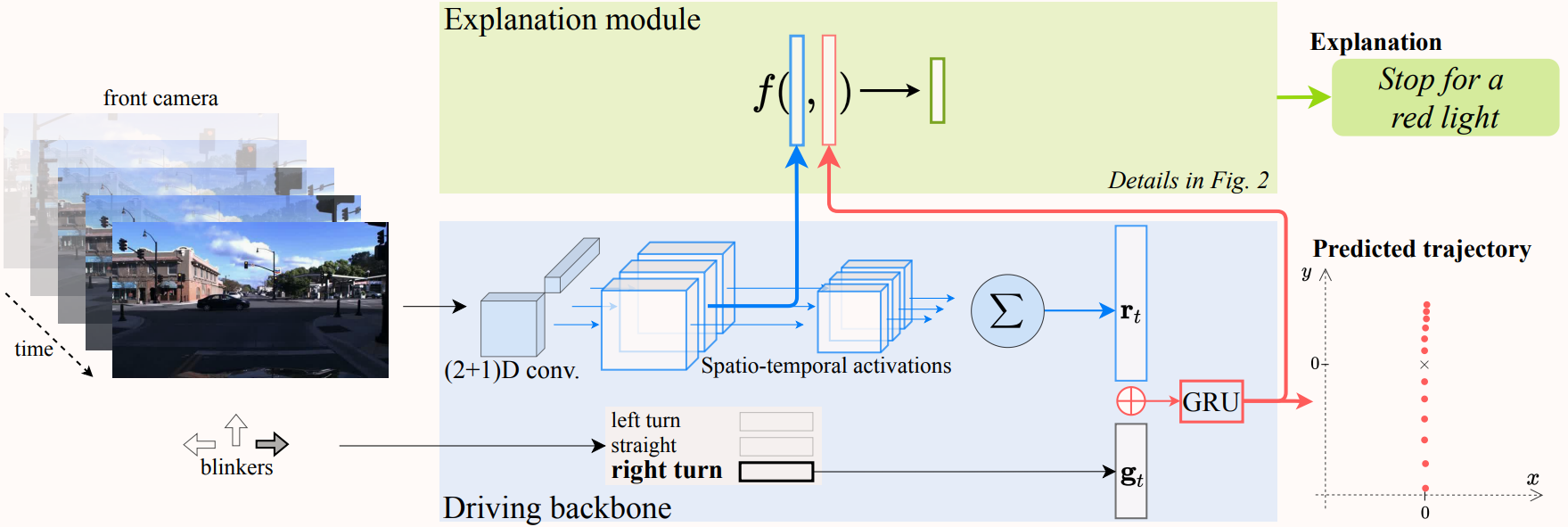
Driving behavior explanation with multi-level fusion
Hédi Ben-Younes*, Éloi Zablocki*, Patrick Pérez, Matthieu Cord
Pattern Recognition (PR), 2022
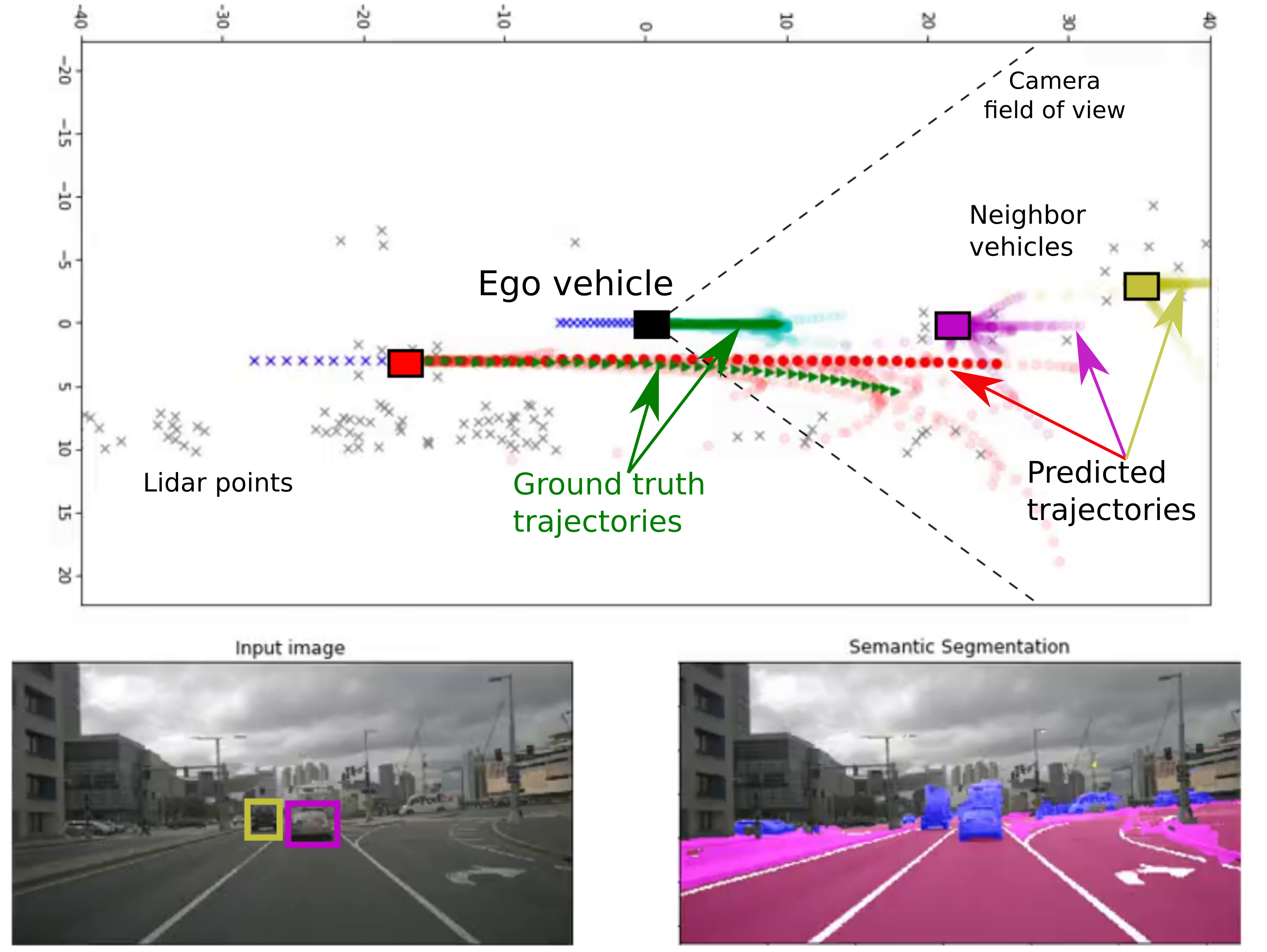
PLOP: Probabilistic poLynomial Objects trajectory Prediction for autonomous driving
Thibault Buhet, Emilie Wirbel, Andrei Bursuc and Xavier Perrotton
Conference on Robot Learning (CoRL), 2020
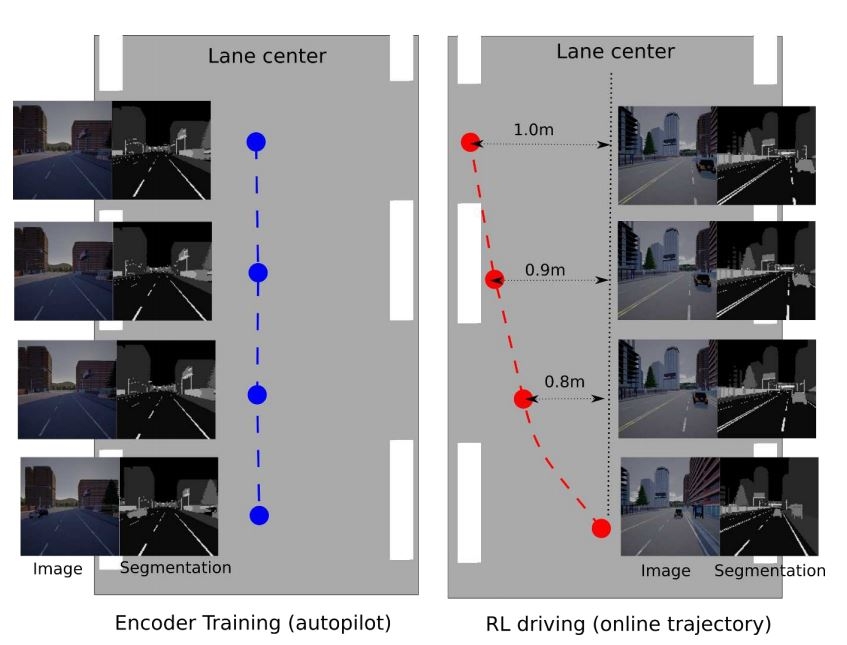
End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances
Marin Toromanoff, Emilie Wirbel, and Fabien Moutarde
Computer Vision and Pattern Recognition (CVPR), 2020
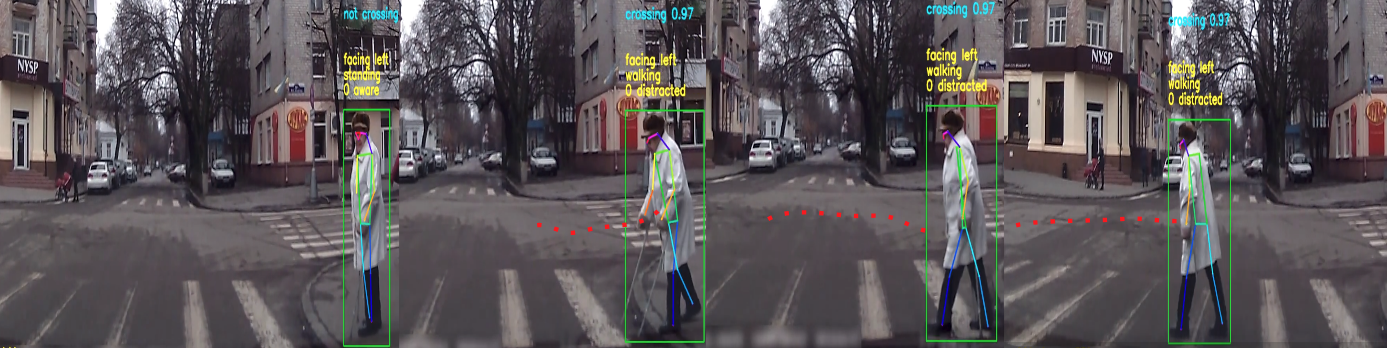
VRUNet: Multi-Task Learning Model for Intent Prediction of Vulnerable Road Users
Adithya Ranga, Filippo Giruzzi, Jagdish Bhanushali, Emilie Wirbel, Patrick Pérez, Tuan-Hung Vu, Xavier Perotton
Electronic Imaging, 2020