3D perception
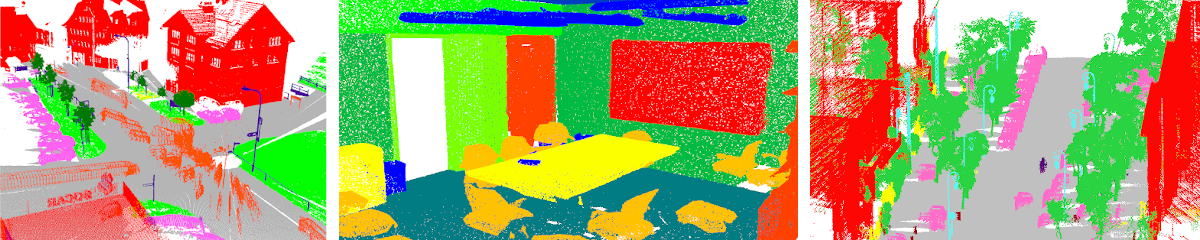
Each sensor delivers information about the 3D world around the vehicle. Making sense of this information in terms of drivable space and important objects (road users, curb, obstacles, street furnitures) in 3D is required for the driving system to plan and act in the safest and most confortable way. This encompasses several challenging tasks, in particular detection and segmentation of objects in point clouds as in FKAConv at ACCV’20.
Publications

Three Pillars improving Vision Foundation Model Distillation for Lidar
Gilles Puy, Spyros Gidaris, Alexandre Boulch, Oriane Siméoni, Corentin Sautier, Patrick Pérez, Andrei Bursuc, Renaud Marlet
Computer Vision and Pattern Recognition (CVPR), 2024
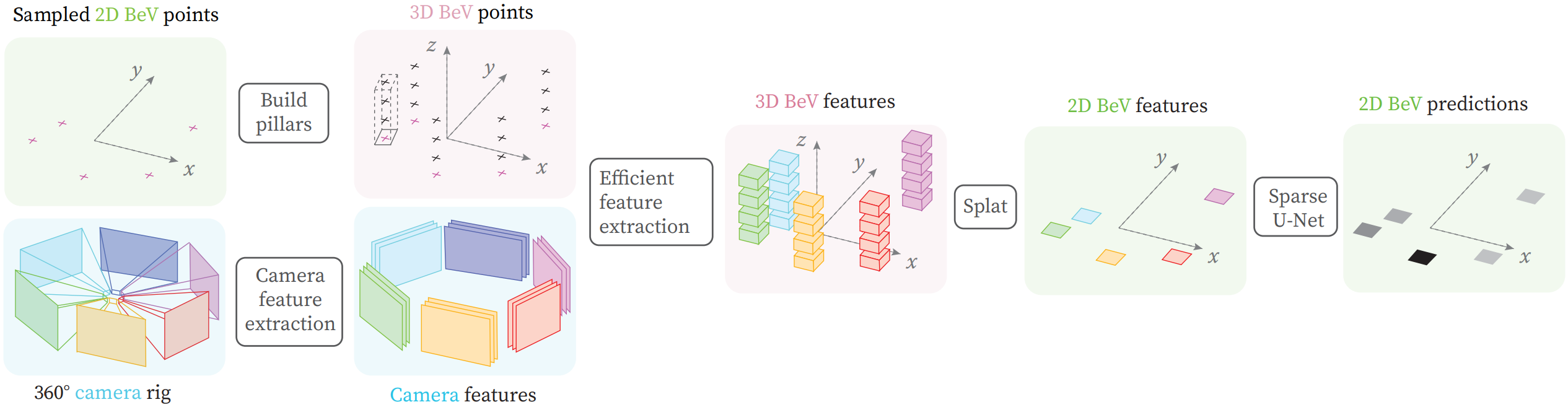
PointBeV: A Sparse Approach to BeV Predictions
Loïck Chambon, Éloi Zablocki, Mickaël Chen, Florent Bartoccioni, Patrick Pérez, Matthieu Cord
Computer Vision and Pattern Recognition (CVPR), 2024
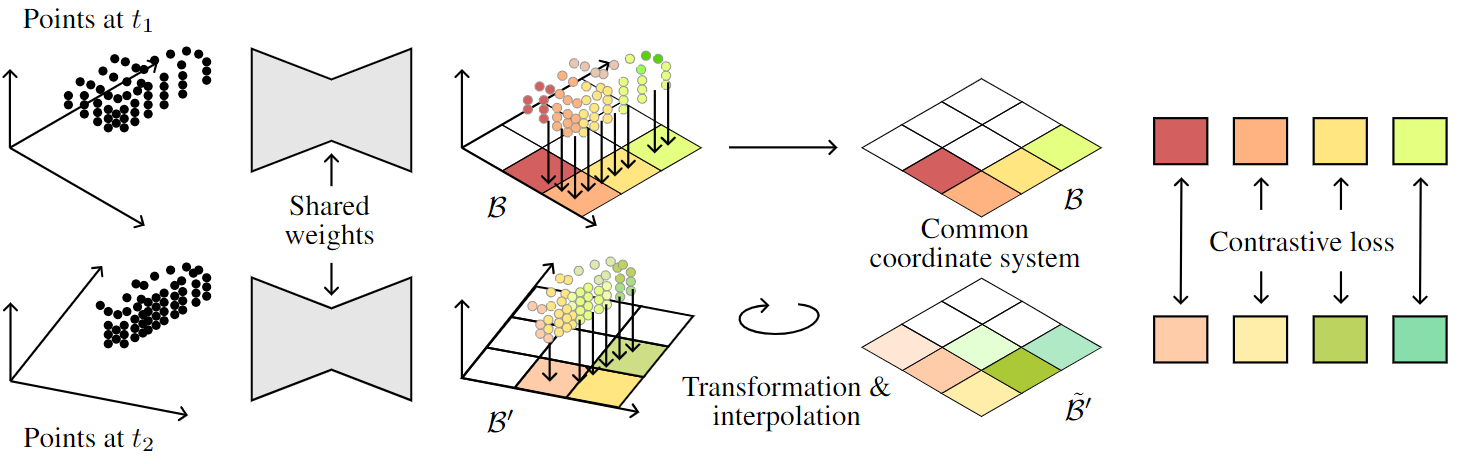
BEVContrast: Self-Supervision in BEV Space for Automotive Lidar Point Clouds
Corentin Sautier, Gilles Puy, Alexandre Boulch, Renaud Marlet, Vincent Lepetit
International Conference on 3D Vision (3DV), 2024
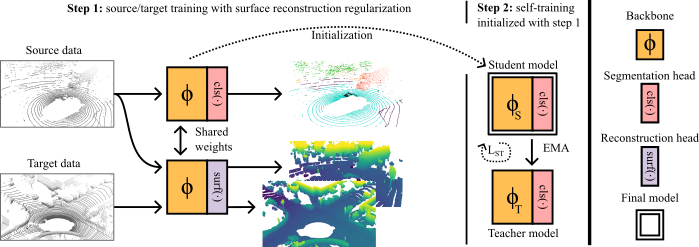
SALUDA: Surface-based Automotive Lidar Unsupervised Domain Adaptation
Bjoern Michele, Alexandre Boulch, Gilles Puy, Tuan-Hung Vu, Renaud Marlet and Nicolas Courty
International Conference on 3D Vision (3DV), 2024
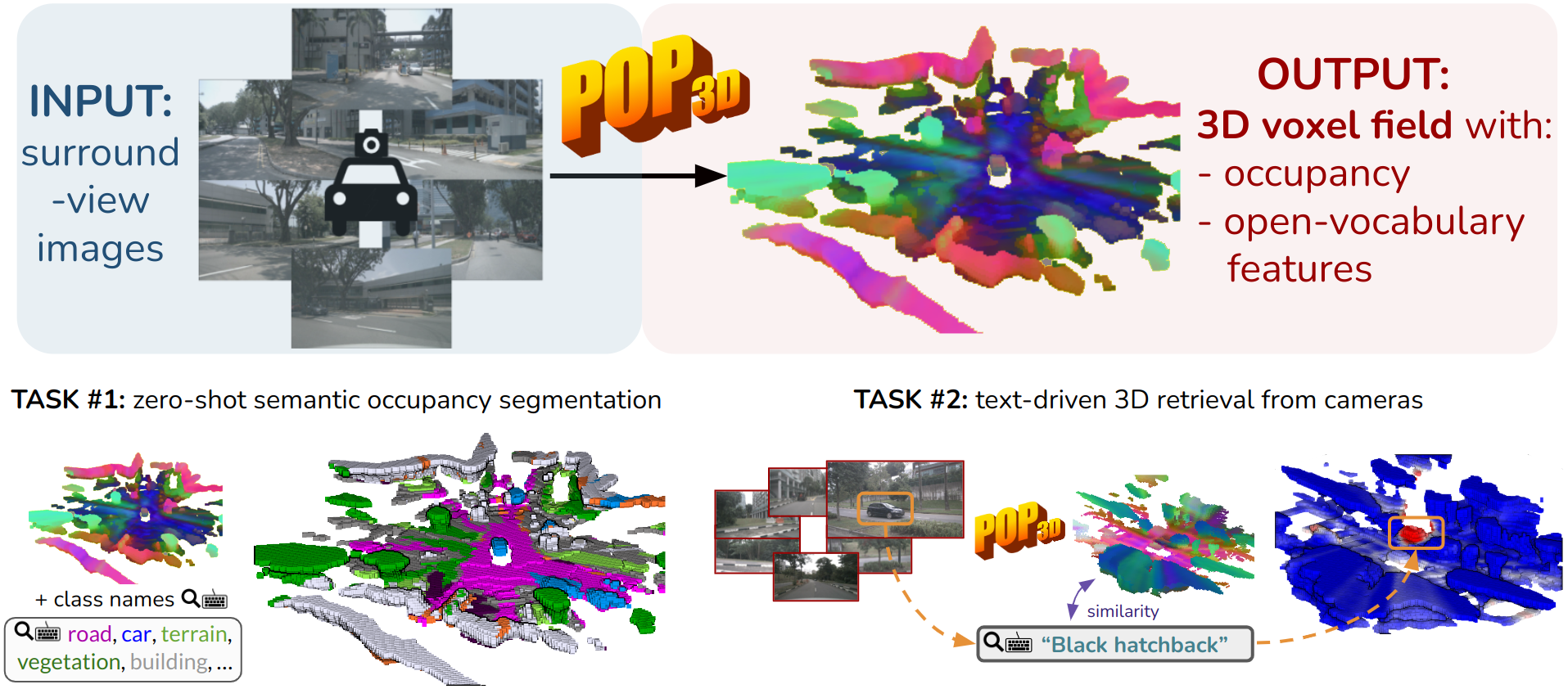
POP-3D: Open-Vocabulary 3D Occupancy Prediction from Images
Antonin Vobecky, Oriane Siméoni, David Hurych, Spyros Gidaris, Andrei Bursuc, Patrick Pérez, Josef Sivic
Advances in Neural Information Processing Systems (NeurIPS), 2023
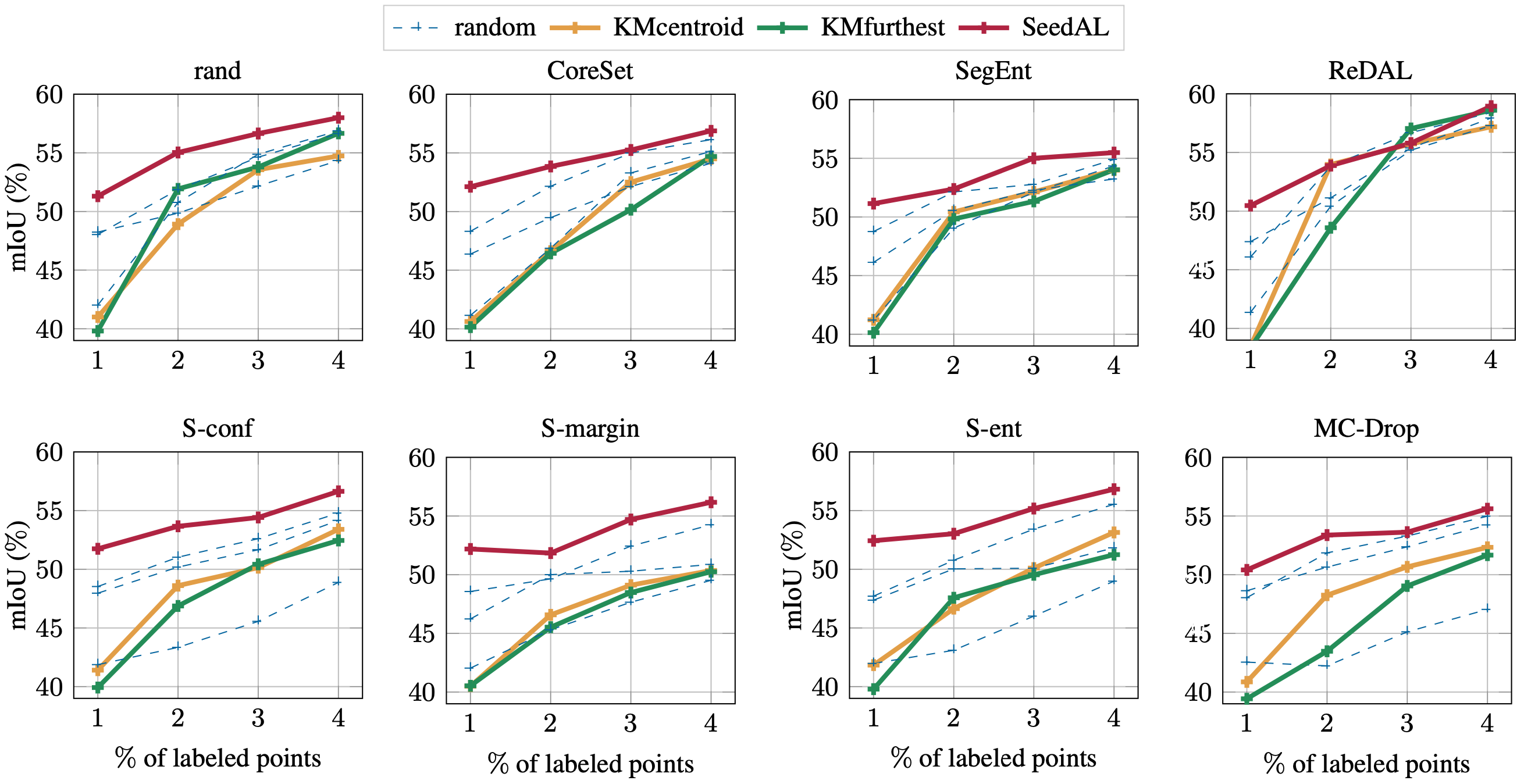
You Never Get a Second Chance To Make a Good First Impression: Seeding Active Learning for 3D Semantic Segmentation
Nermin Samet, Oriane Siméoni, Gilles Puy, Georgy Ponimatkin, Renaud Marlet, and Vincent Lepetit
International Conference on Computer Vision (ICCV), 2023
DiffHPE: Robust, Coherent 3D Human Pose Lifting with Diffusion
Cédric Rommel, Eduardo Valle, Mickaël Chen, Souhaiel Khalfaoui, Renaud Marlet, Matthieu Cord, Patrick Pérez
International Conference on Computer Vision (ICCV) Workshop, 2023
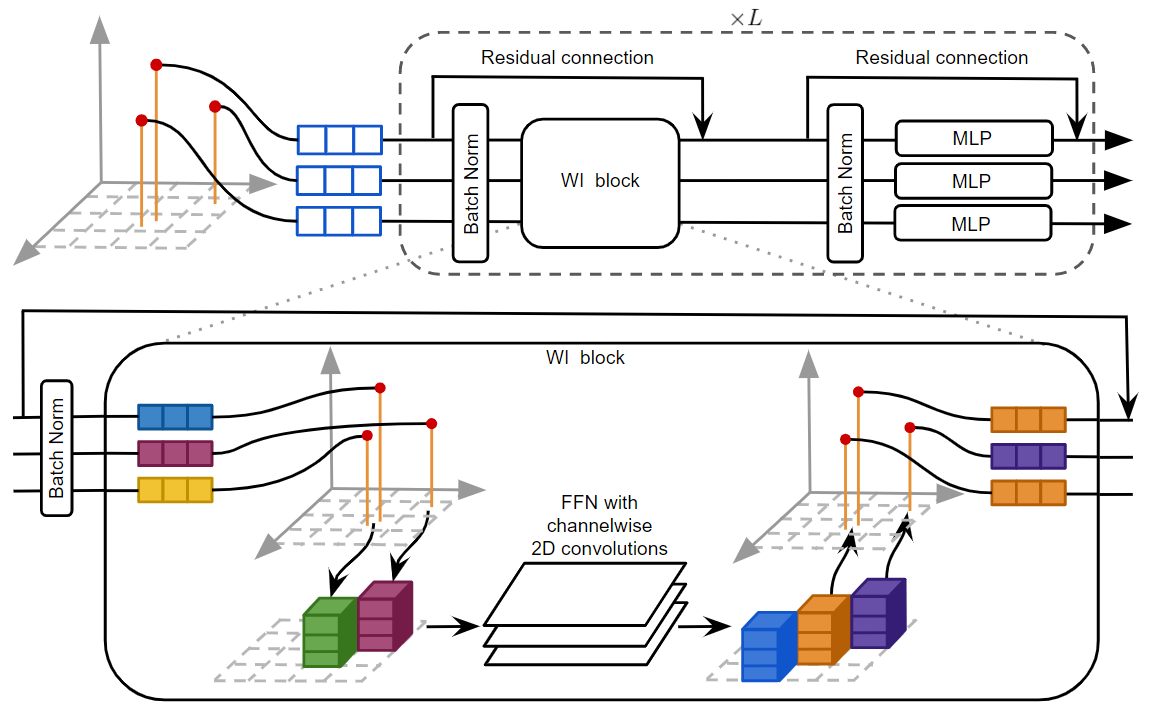
Using a Waffle Iron for Automotive Point Cloud Semantic Segmentation
Gilles Puy, Alexandre Boulch, and Renaud Marlet
International Conference on Computer Vision (ICCV), 2023
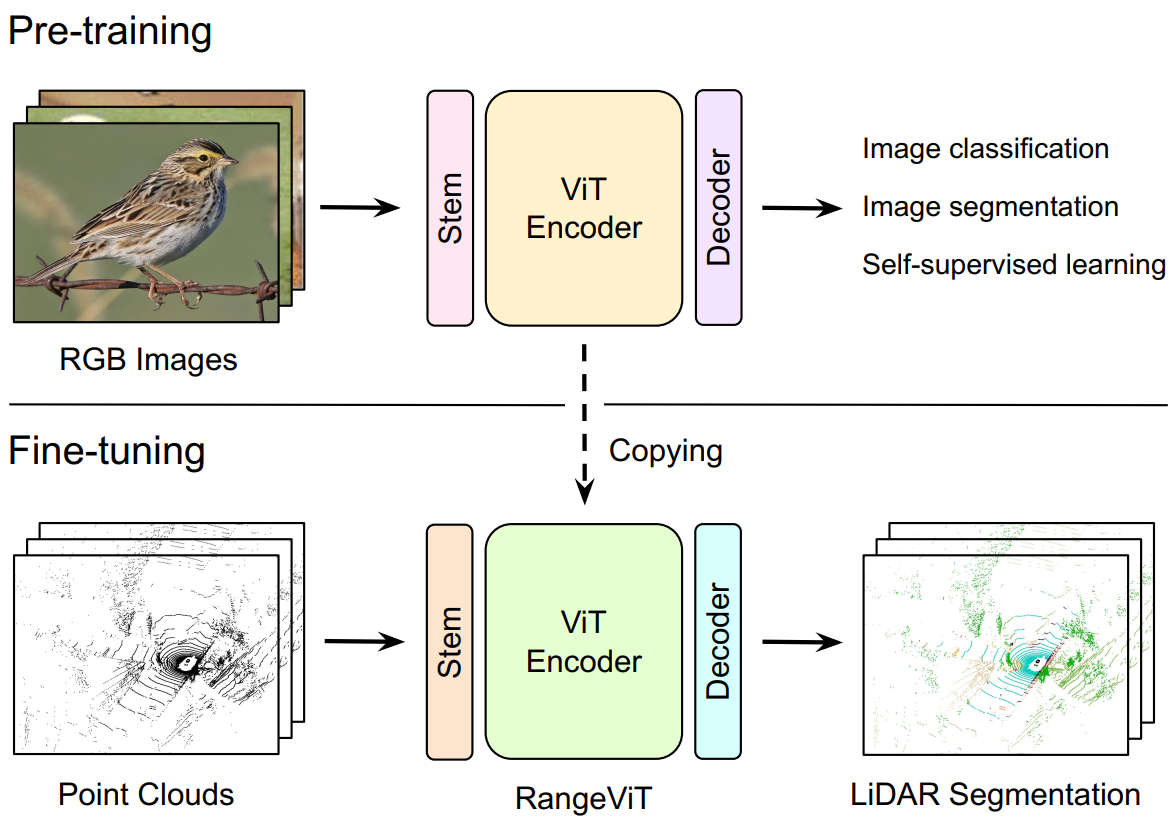
RangeViT: Towards Vision Transformers for 3D Semantic Segmentation in Autonomous Driving
Angelika Ando, Spyros Gidaris, Andrei Bursuc, Gilles Puy, Alexandre Boulch, and Renaud Marlet
Computer Vision and Pattern Recognition (CVPR), 2023
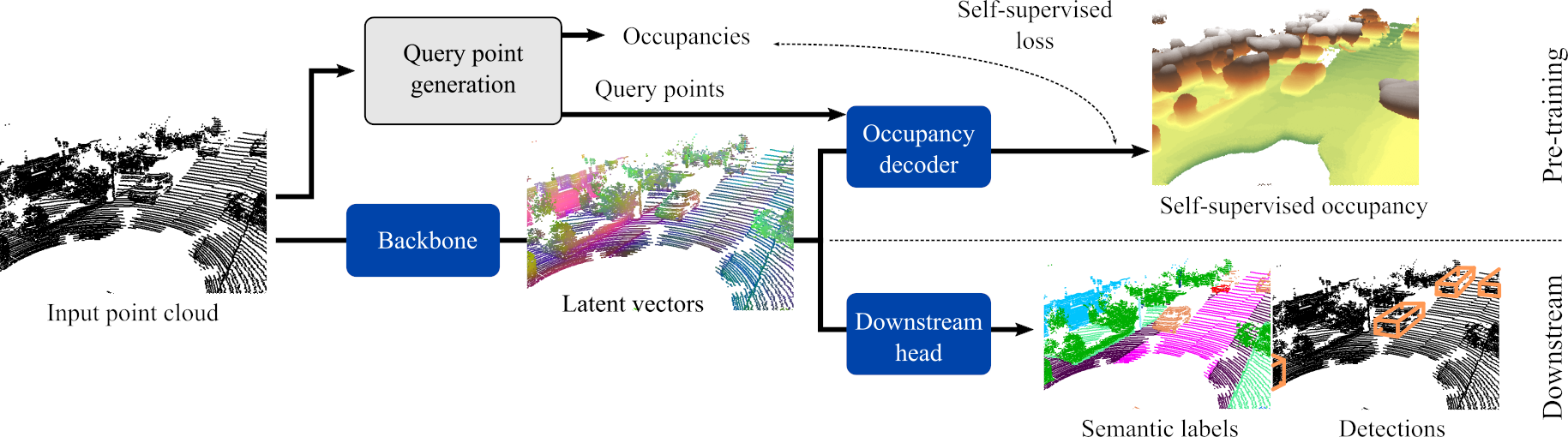
ALSO: Automotive Lidar Self-supervision by Occupancy estimation
Alexandre Boulch, Corentin Sautier, Björn Michele, Gilles Puy, Renaud Marlet
Computer Vision and Pattern Recognition (CVPR), 2023
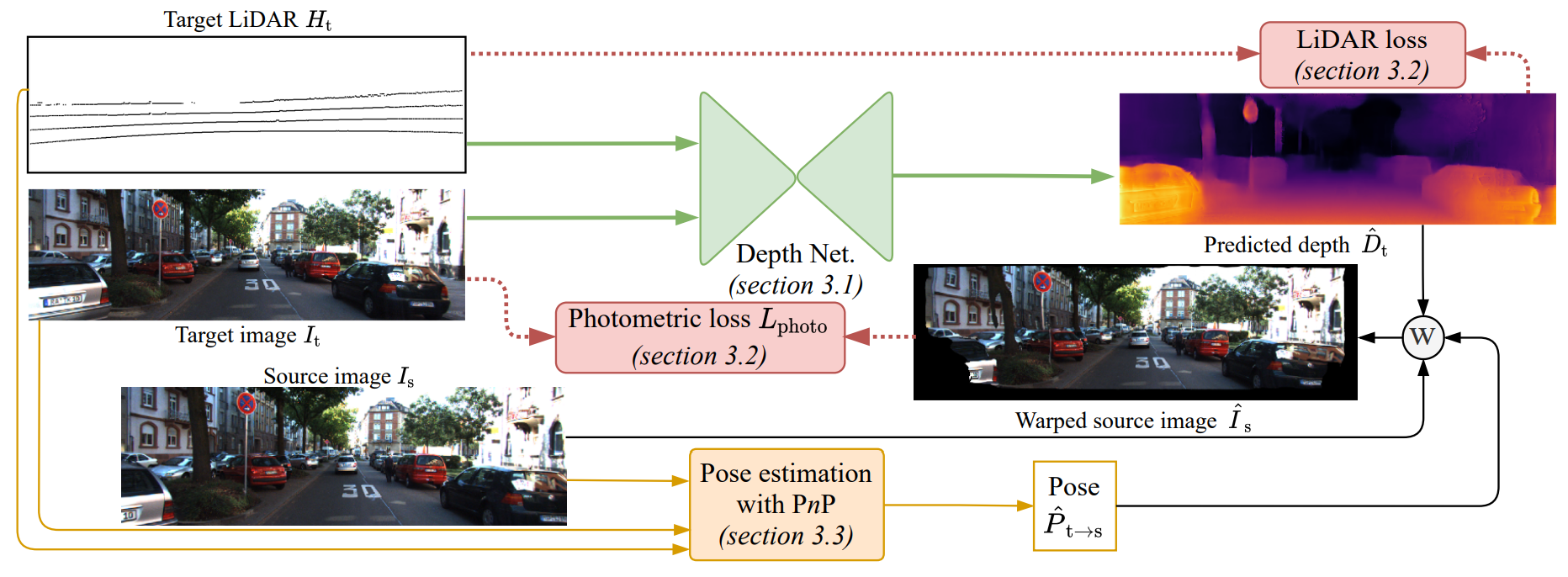
LiDARTouch: Monocular metric depth estimation with a few-beam LiDAR
Florent Bartoccioni, Éloi Zablocki, Patrick Pérez, Matthieu Cord, Karteek Alahari
Computer Vision and Image Understanding (CVIU), 2022
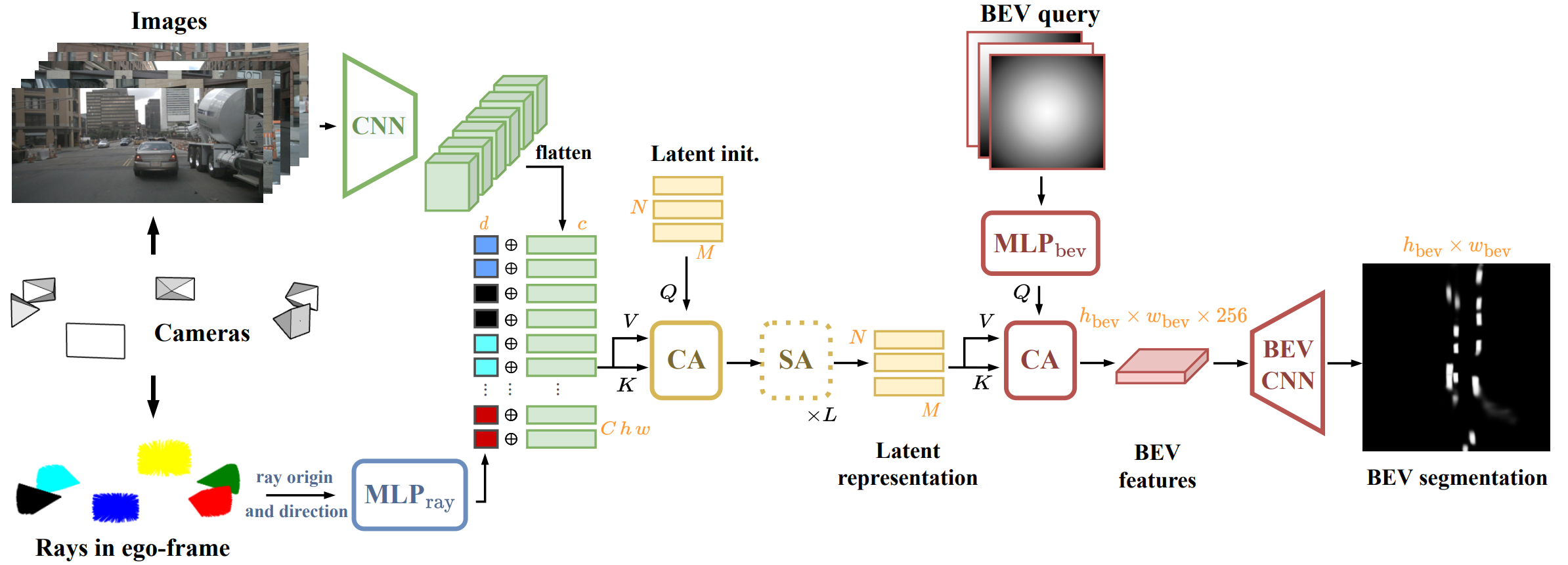
LaRa: Latents and Rays for Multi-Camera Bird's-Eye-View Semantic Segmentation
Florent Bartoccioni, Éloi Zablocki, Andrei Bursuc, Patrick Pérez, Matthieu Cord, Karteek Alahari
Conference on Robot Learning, 2022
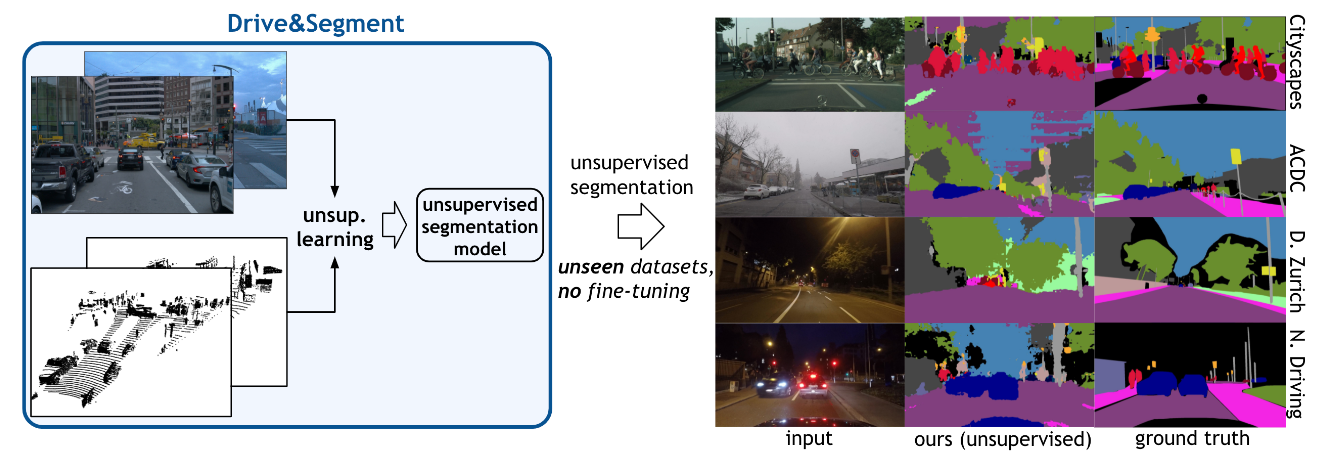
Drive&Segment: Unsupervised Semantic Segmentation of Urban Scenes via Cross-modal Distillation
Antonin Vobecky, Oriane Siméoni, David Hurych, Spyros Gidaris, Andrei Bursuc, Patrick Pérez, Josef Sivic
European Conference on Computer Vision (ECCV), 2022
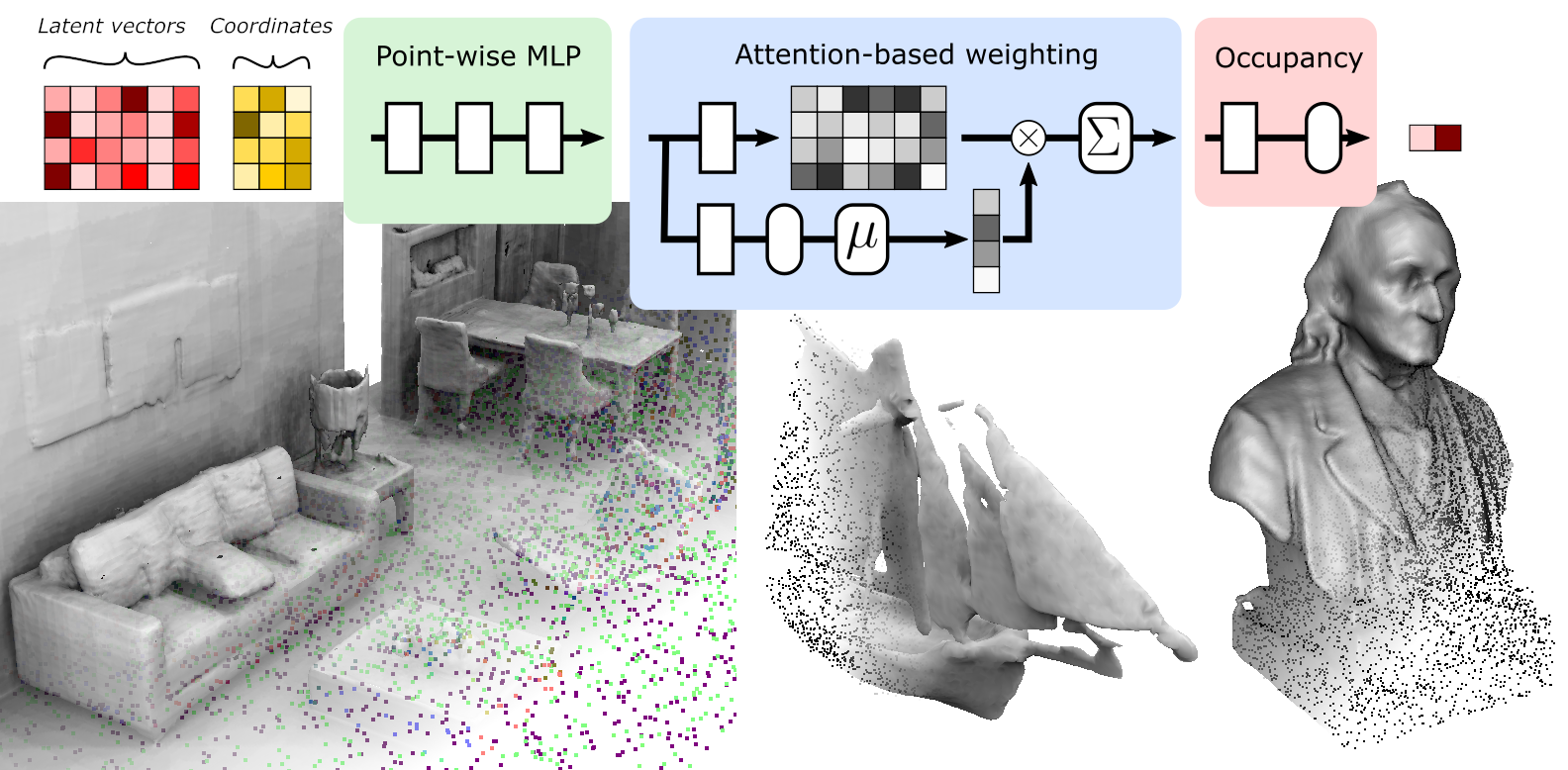
POCO: Point Convolution for Surface Reconstruction
Alexandre Boulch and Renaud Marlet
Computer Vision and Pattern Recognition (CVPR), 2022
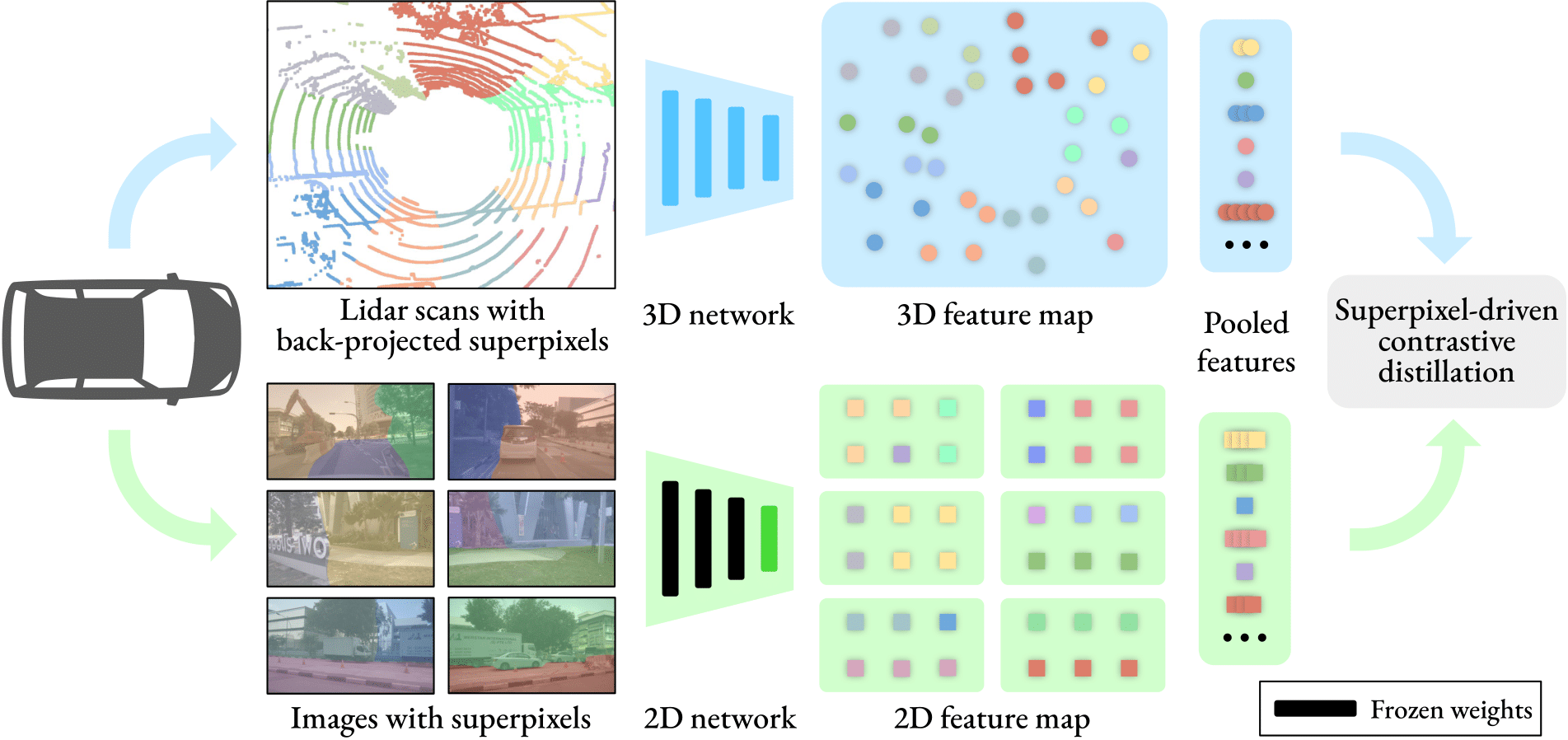
Image-to-Lidar Self-Supervised Distillation for Autonomous Driving Data
Corentin Sautier, Gilles Puy, Spyros Gidaris, Alexandre Boulch, Andrei Bursuc, and Renaud Marlet
Computer Vision and Pattern Recognition (CVPR), 2022
NeeDrop: Unsupervised Shape Representation from Sparse Point Clouds using Needle Dropping
Alexandre Boulch, Pierre-Alain Langlois, Gilles Puy, and Renaud Marlet
International Conference on 3D Vision (3DV), 2021
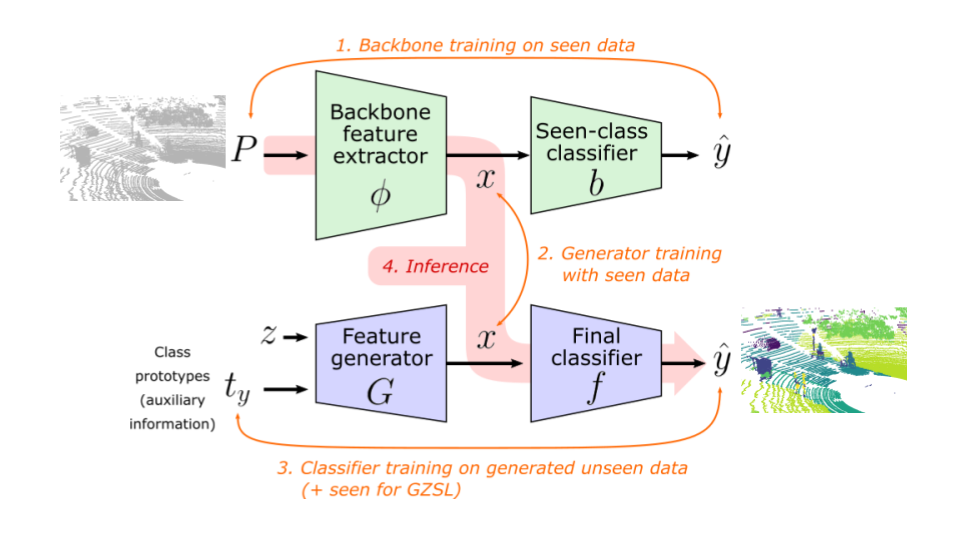
Generative Zero-Shot Learning for Semantic Segmentation of 3D Point Clouds
Bjoern Michele, Alexandre Boulch, Gilles Puy, Maxime Bucher, and Renaud Marlet
International Conference on 3D Vision (3DV), 2021
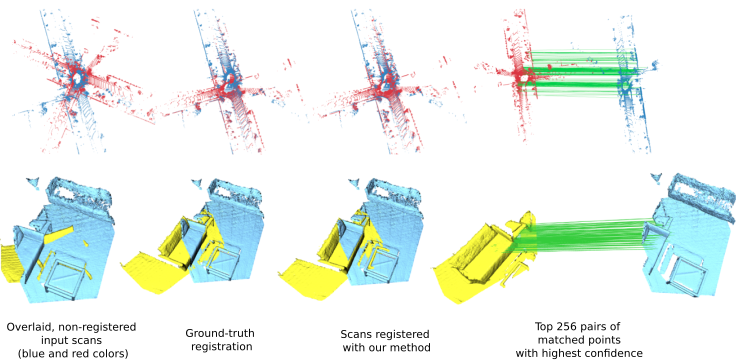
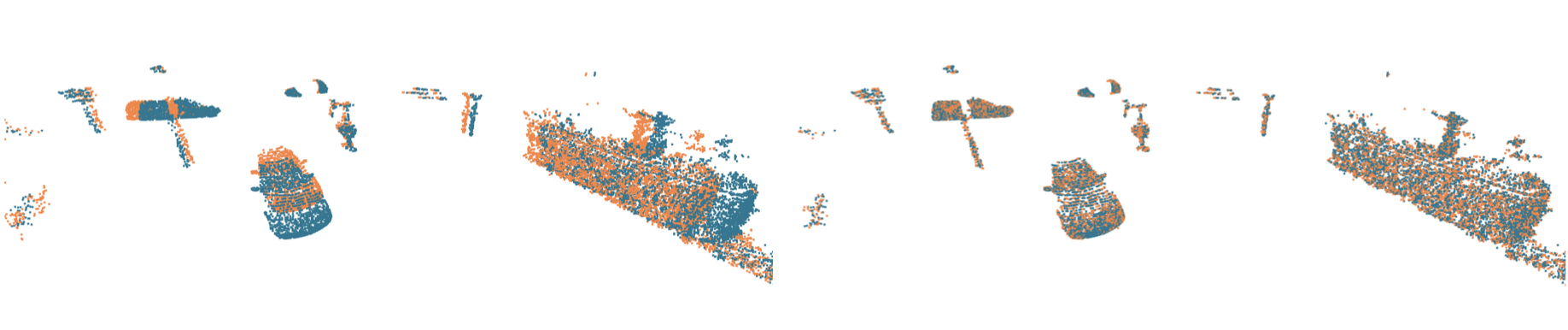
PCAM: Product of Cross-Attention Matrices for Rigid Registration of Point Clouds
Anh-Quan Cao, Gilles Puy, Alexandre Boulch, and Renaud Marlet
International Conference on Computer Vision (ICCV), 2021

STaRFlow: A SpatioTemporal Recurrent Cell for Lightweight Multi-Frame Optical Flow Estimation
Pierre Godet, Alexandre Boulch, Aurelien Plyer and Guy Le Besnerais
International Conference on Pattern Recognition (ICPR), 2020
FKAConv: Feature-Kernel Alignment for Point Cloud Convolutiont
Alexandre Boulch, Gilles Puy, and Renaud Marlet
Asian Conference on Computer Vision (ACCV), 2020
FLOT: Scene Flow on Point Clouds guided by Optimal Transport
Gilles Puy, Alexandre Boulch, and Renaud Marlet
European Conference on Computer Vision (ECCV), 2020

ConvPoint: Continuous Convolutions for Point Cloud Processing
Alexandre Boulch
Computers & Graphics Journal, 2020