Multi-sensor perception
Automated driving relies first on a diverse range of sensors, like Valeo’s fish-eye cameras, LiDARs, radars and ultrasonics. Exploiting at best the outputs of each of these sensors at any instant is fundamental to understand the complex environment of the vehicle and gain robustness. To this end, we explore various machine learning approaches where sensors are considered either in isolation (as radar in Carrada at ICPR’20) or collectively (as in xMUDA at CVPR’20).
Publications
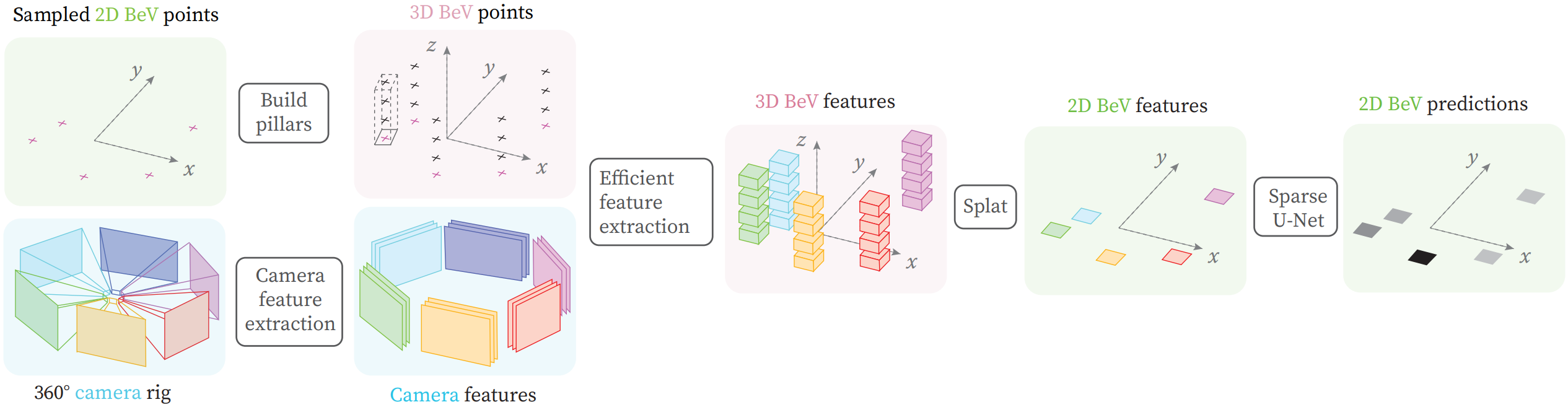
PointBeV: A Sparse Approach to BeV Predictions
Loïck Chambon, Éloi Zablocki, Mickaël Chen, Florent Bartoccioni, Patrick Pérez, Matthieu Cord
Computer Vision and Pattern Recognition (CVPR), 2024
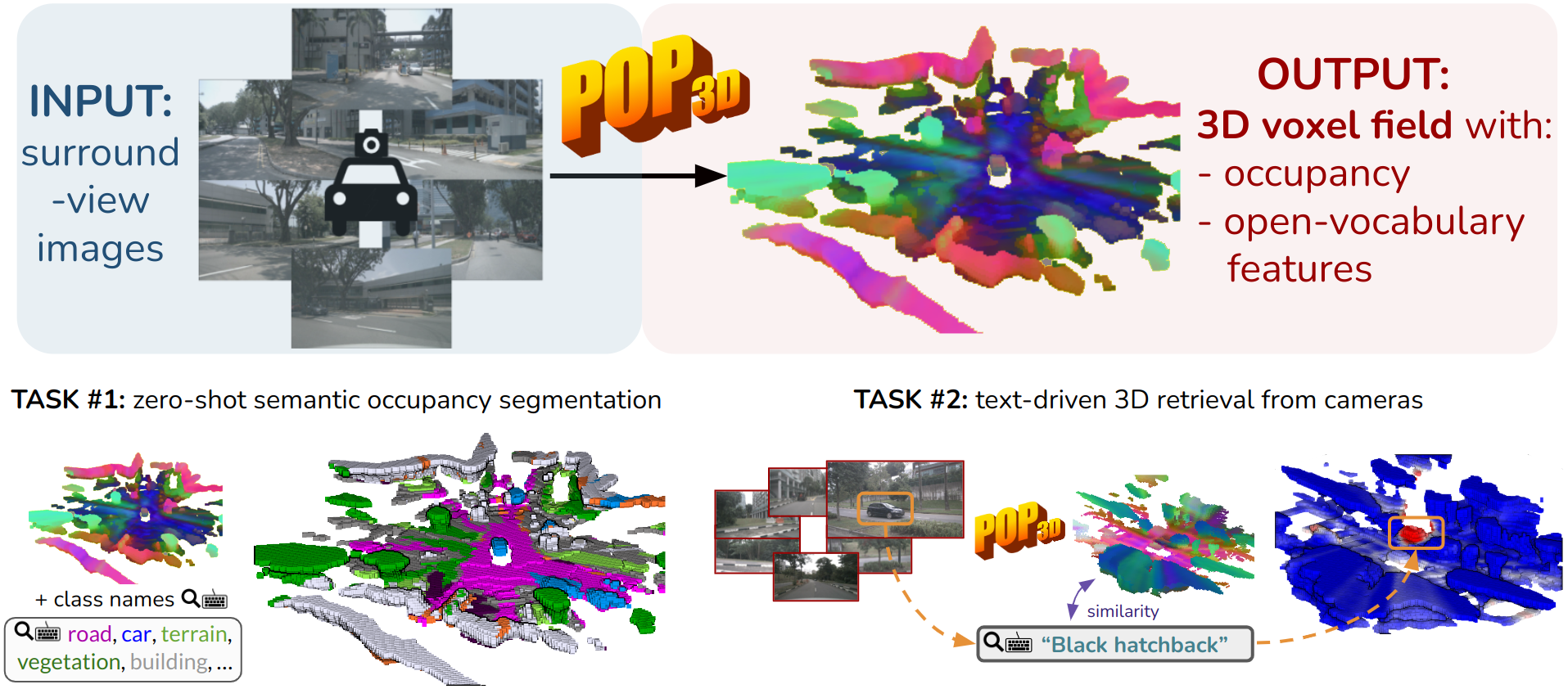
POP-3D: Open-Vocabulary 3D Occupancy Prediction from Images
Antonin Vobecky, Oriane Siméoni, David Hurych, Spyros Gidaris, Andrei Bursuc, Patrick Pérez, Josef Sivic
Advances in Neural Information Processing Systems (NeurIPS), 2023
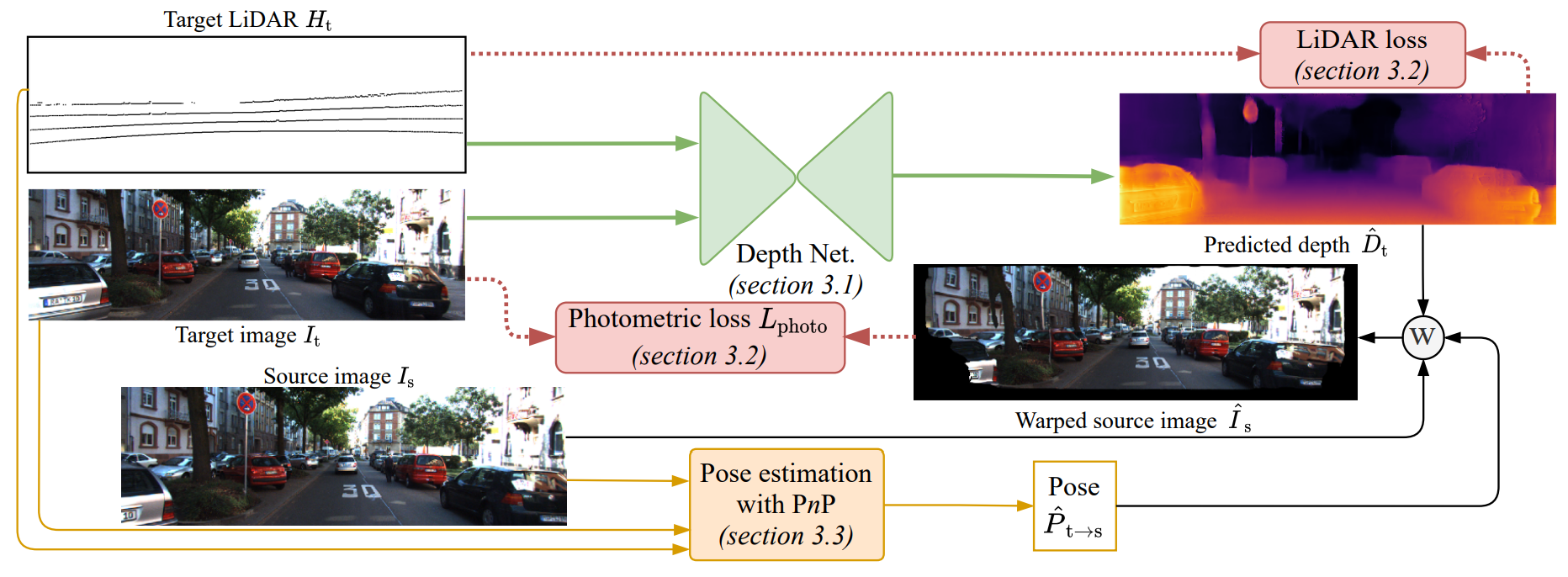
LiDARTouch: Monocular metric depth estimation with a few-beam LiDAR
Florent Bartoccioni, Éloi Zablocki, Patrick Pérez, Matthieu Cord, Karteek Alahari
Computer Vision and Image Understanding (CVIU), 2022
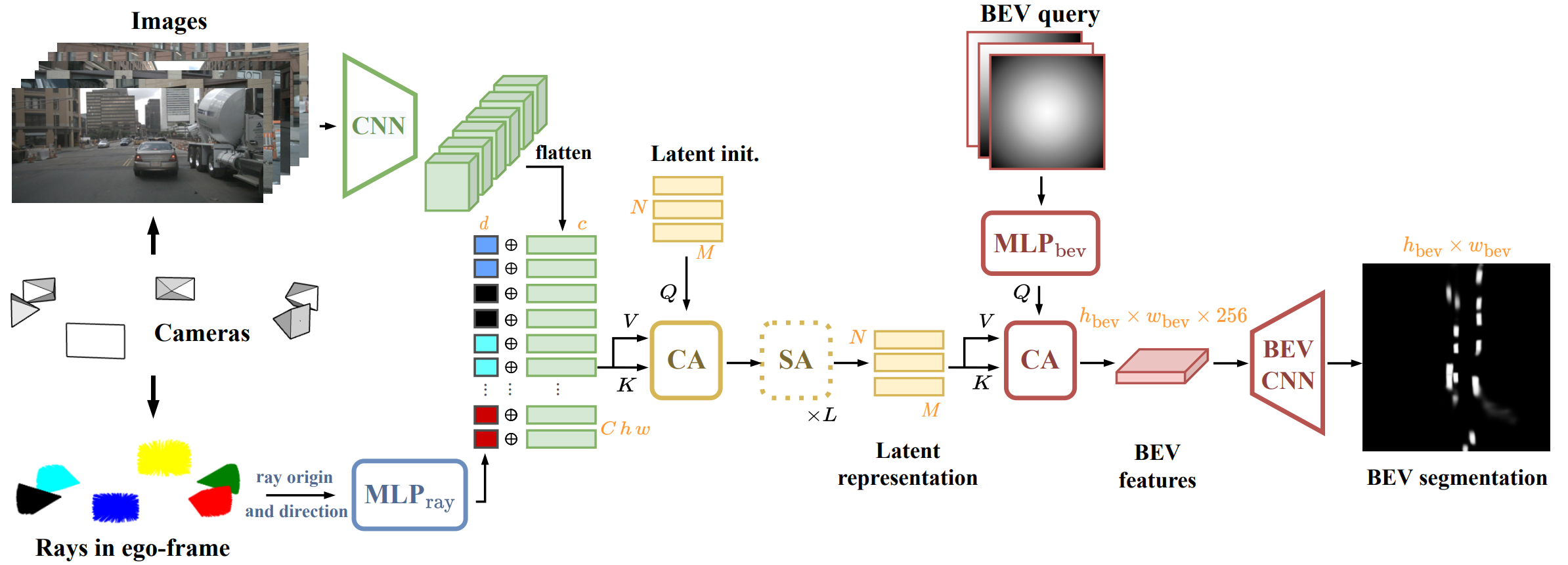
LaRa: Latents and Rays for Multi-Camera Bird's-Eye-View Semantic Segmentation
Florent Bartoccioni, Éloi Zablocki, Andrei Bursuc, Patrick Pérez, Matthieu Cord, Karteek Alahari
Conference on Robot Learning, 2022
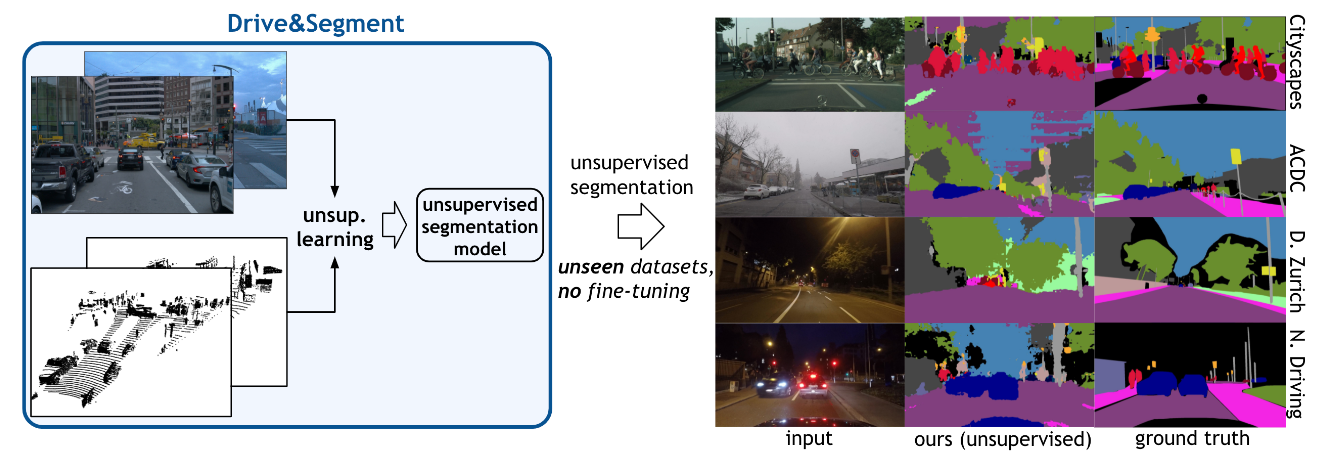
Drive&Segment: Unsupervised Semantic Segmentation of Urban Scenes via Cross-modal Distillation
Antonin Vobecky, Oriane Siméoni, David Hurych, Spyros Gidaris, Andrei Bursuc, Patrick Pérez, Josef Sivic
European Conference on Computer Vision (ECCV), 2022
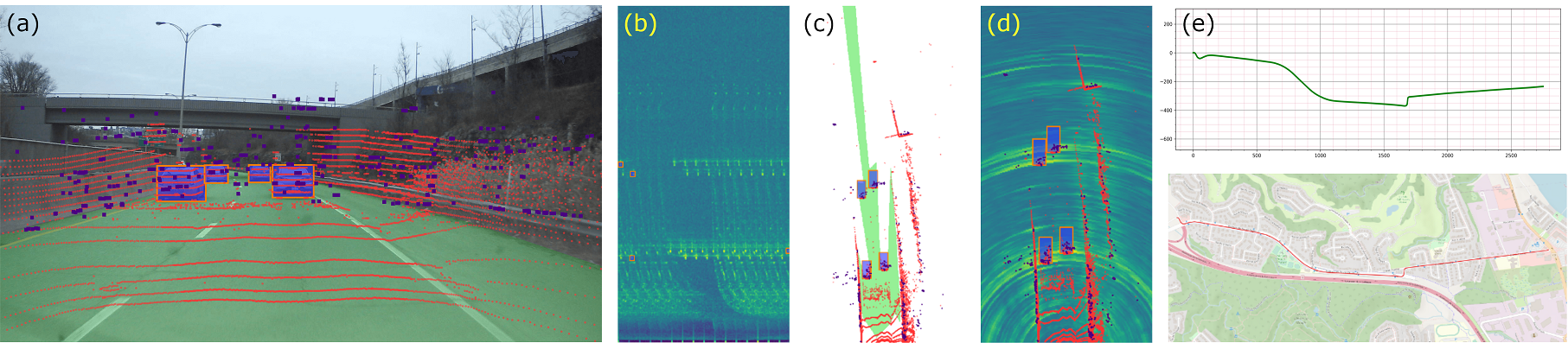
Raw High-Definition Radar for Multi-Task Learning
Julien Rebut, Arthur Ouaknine, Waqas Malik, and Patrick Pérez
Computer Vision and Pattern Recognition (CVPR), 2022
Cross-modal Learning for Domain Adaptation in 3D Semantic Segmentation
Maximilian Jaritz, Tuan-Hung Vu, Raoul de Charette, Émilie Wirbel, and Patrick Pérez
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022
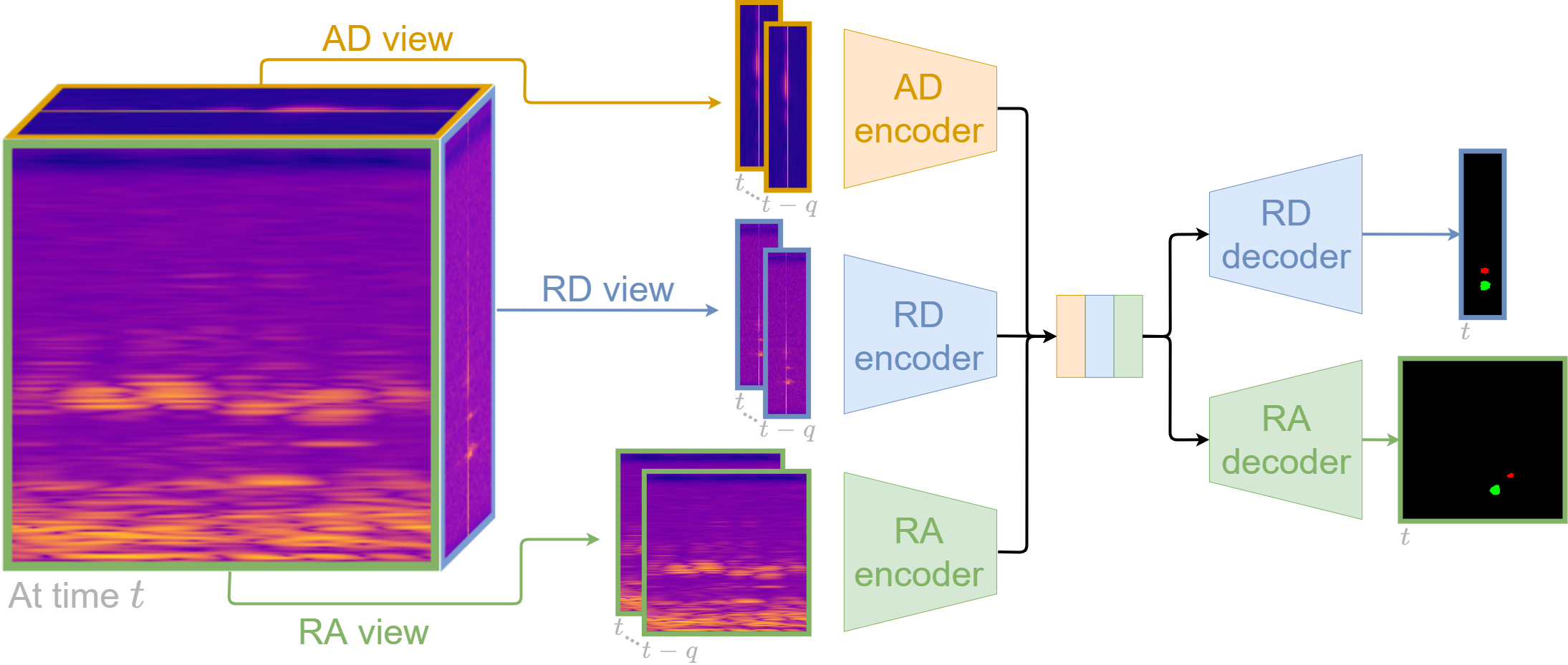
Multi-View Radar Semantic Segmentation
Arthur Ouaknine, Alasdair Newson, Patrick Pérez, Florence Tupin and Julien Rebut
International Conference on Computer Vision (ICCV), 2021
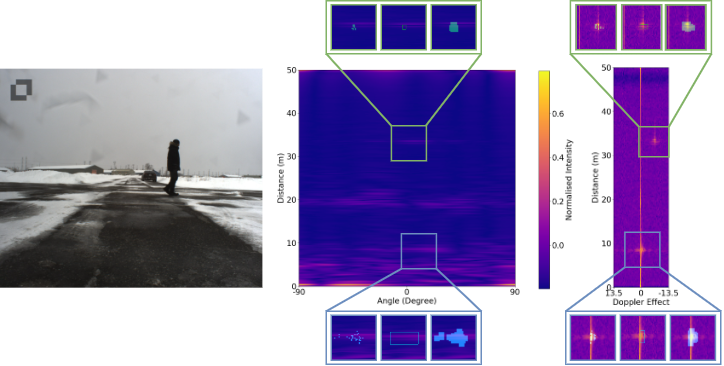
CARRADA Dataset: Camera and Automotive Radar with Range-Angle-Doppler Annotations
Arthur Ouaknine, Alasdair Newson, Julien Rebut, Florence Tupin and Patrick Pérez
International Conference on Pattern Recognition (ICPR), 2020
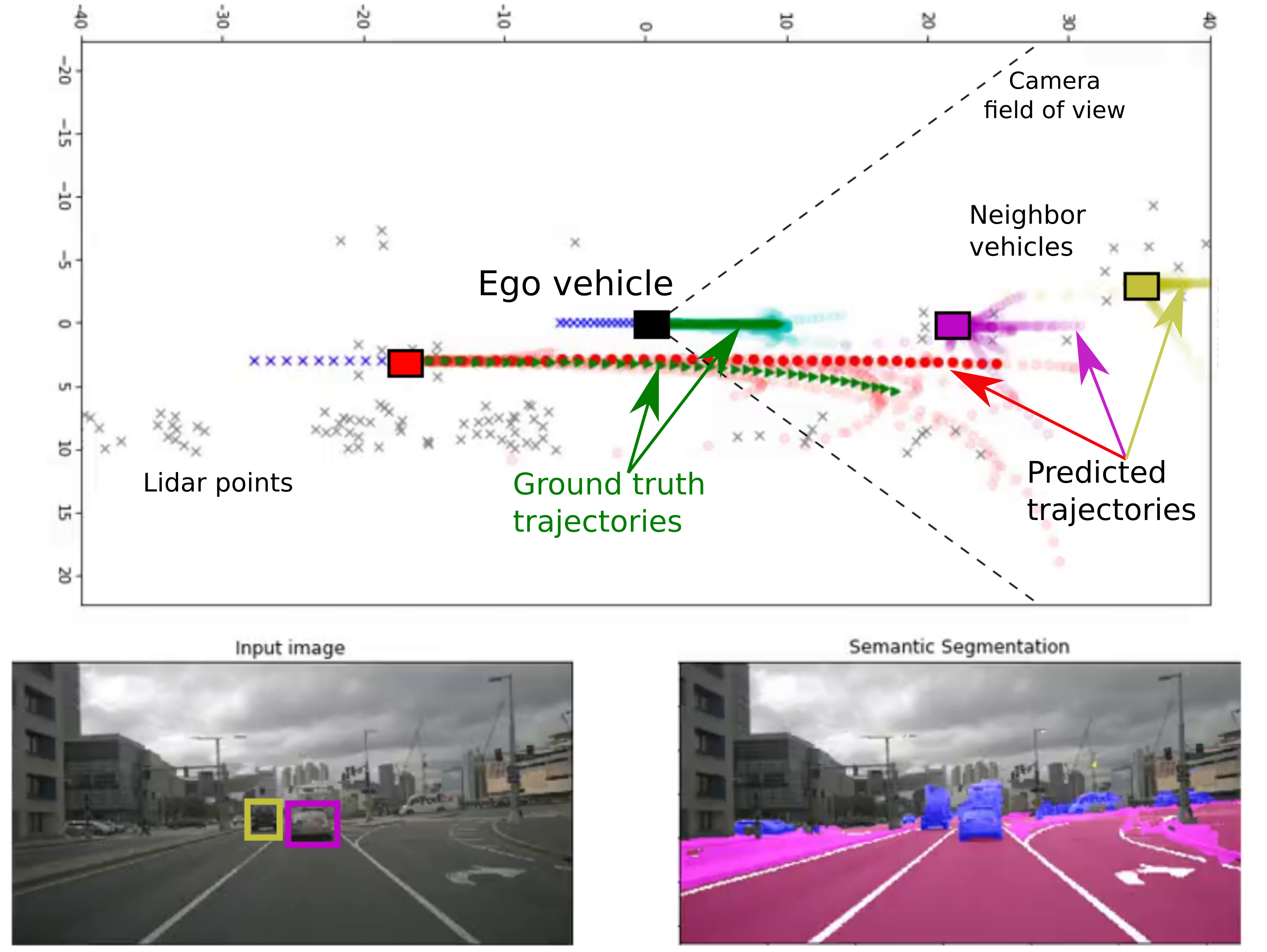
PLOP: Probabilistic poLynomial Objects trajectory Prediction for autonomous driving
Thibault Buhet, Emilie Wirbel, Andrei Bursuc and Xavier Perrotton
Conference on Robot Learning (CoRL), 2020
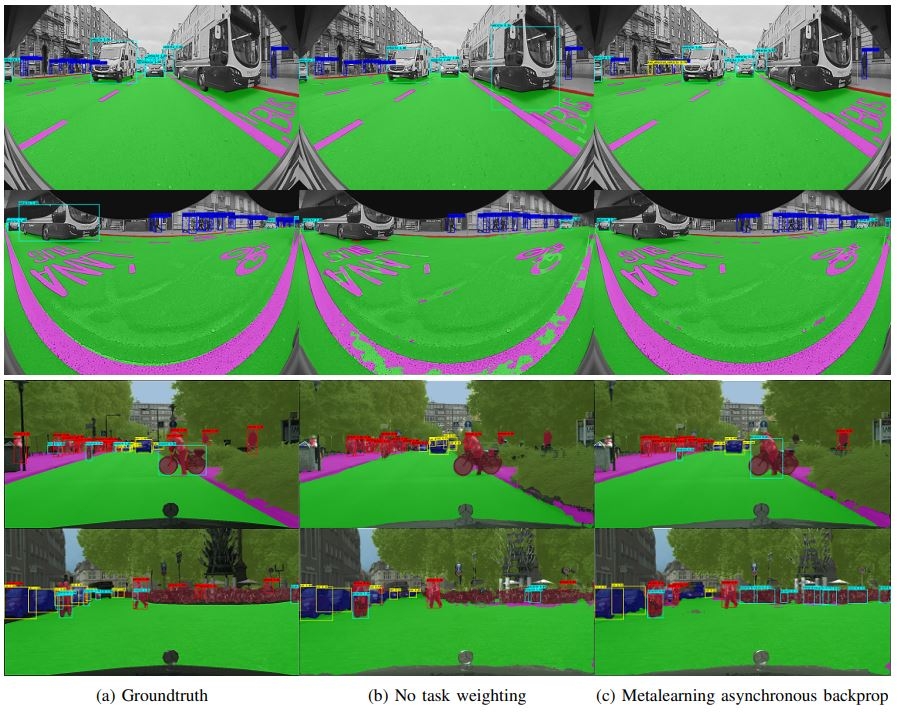
Dynamic Task Weighting Methods for Multi-task Networks in Autonomous Driving Systems
Isabelle Leang, Ganesh Sistu, Fabian Burger, Andrei Bursuc, and Senthil Yogamani
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2020
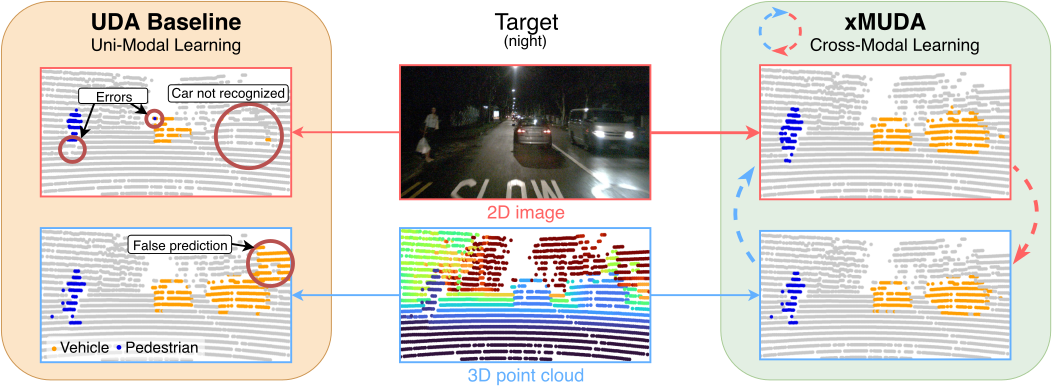
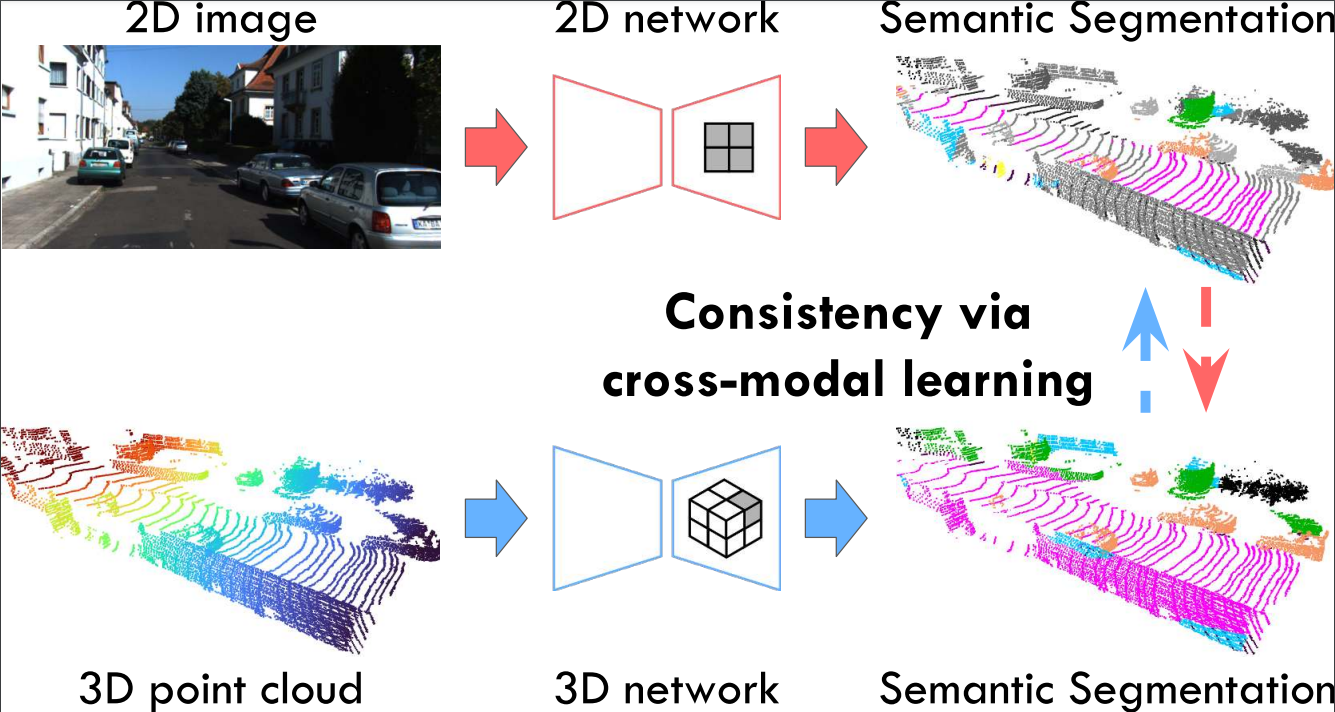
xMUDA: Cross-Modal Unsupervised Domain Adaptation for 3D Semantic Segmentation
Maximilian Jaritz, Tuan-Hung Vu, Raoul de Charette, Émilie Wirbel, and Patrick Pérez
Computer Vision and Pattern Recognition (CVPR), 2020