Reliability
When the unexpected happens, when the weather badly degrades, when a sensor gets blocked, the embarked perception system should diagnose the situation and react accordingly, e.g., by calling an alternative system or the human driver. With this in mind, we investigate ways to improve the robustness of neural nets to input variations, including to adversarial attacks, and to predict automatically the performance and the confidence of their predictions as in ConfidNet at NeurIPS’19.
Publications
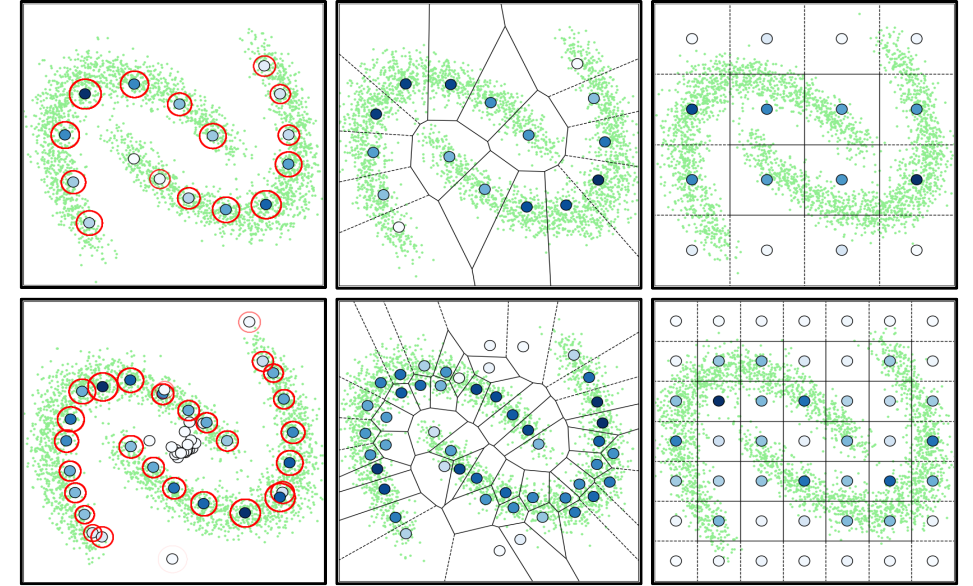
Winner-takes-all learners are geometry-aware conditional density estimators
Victor Letzelter, David Perera, Cédric Rommel, Mathieu Fontaine, Slim Essid, Gaël Richard, Patrick Pérez
International Conference On Machine Learning (ICML), 2024
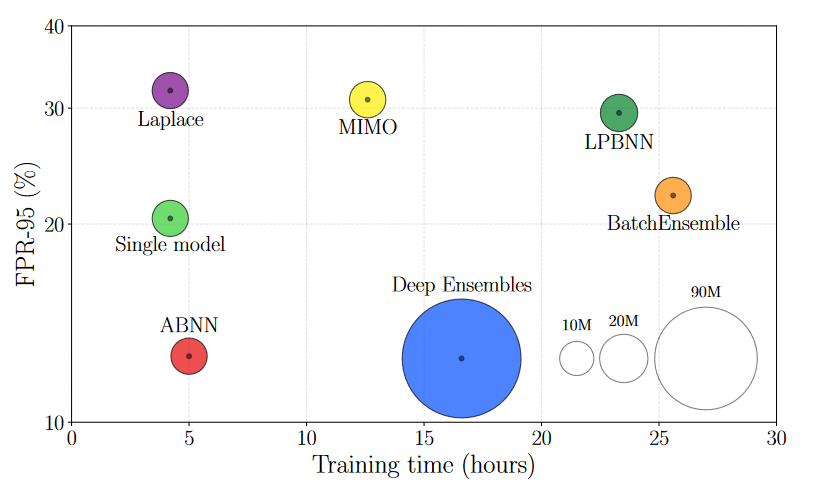
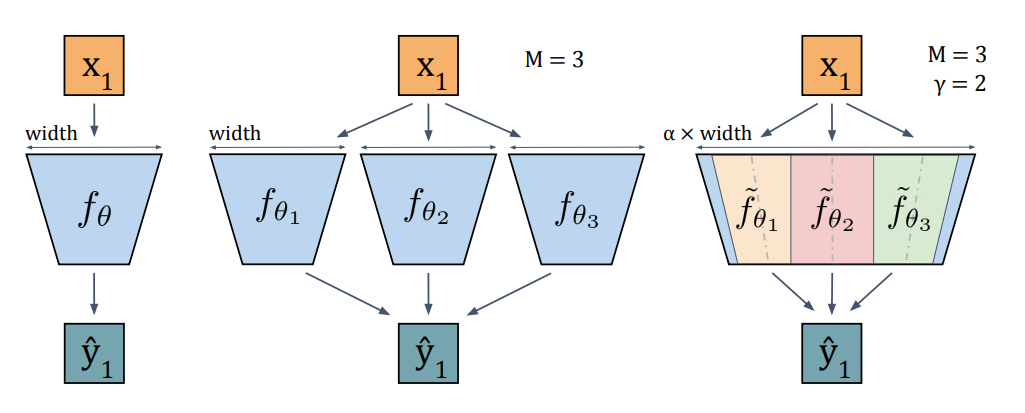
Make Me a BNN: A Simple Strategy for Estimating Bayesian Uncertainty from Pre-trained Models
Gianni Franchi, Olivier Laurent, Maxence Leguéry, Andrei Bursuc, Andrea Pilzer, Angela Yao
Computer Vision and Pattern Recognition (CVPR), 2024
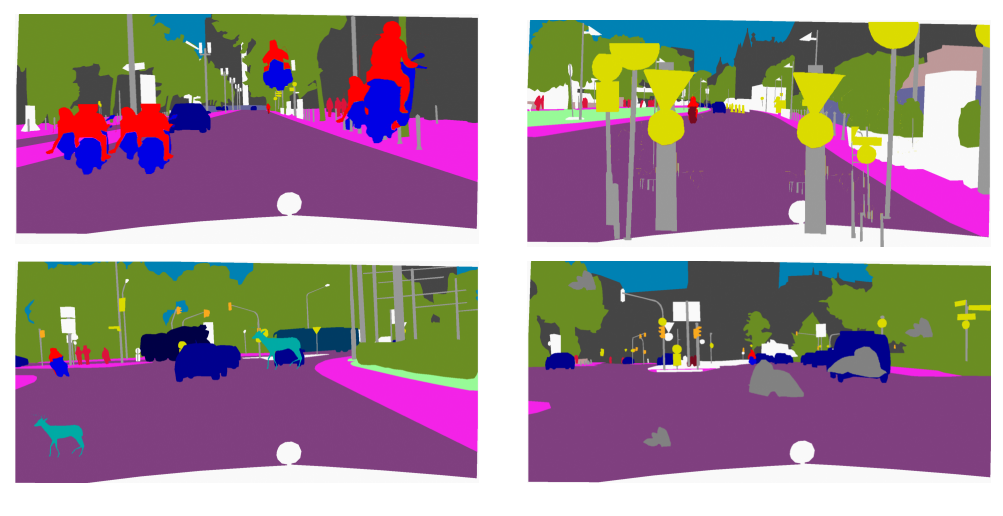
Learning to Generate Training Datasets for Robust Semantic Segmentation
Marwane Hariat, Olivier Laurent, Rémi Kazmierczak, Shihao Zhang, Andrei Bursuc, Angela Yao, Gianni Franchi
Winter Conference on Applications of Computer Vision (WACV), 2024
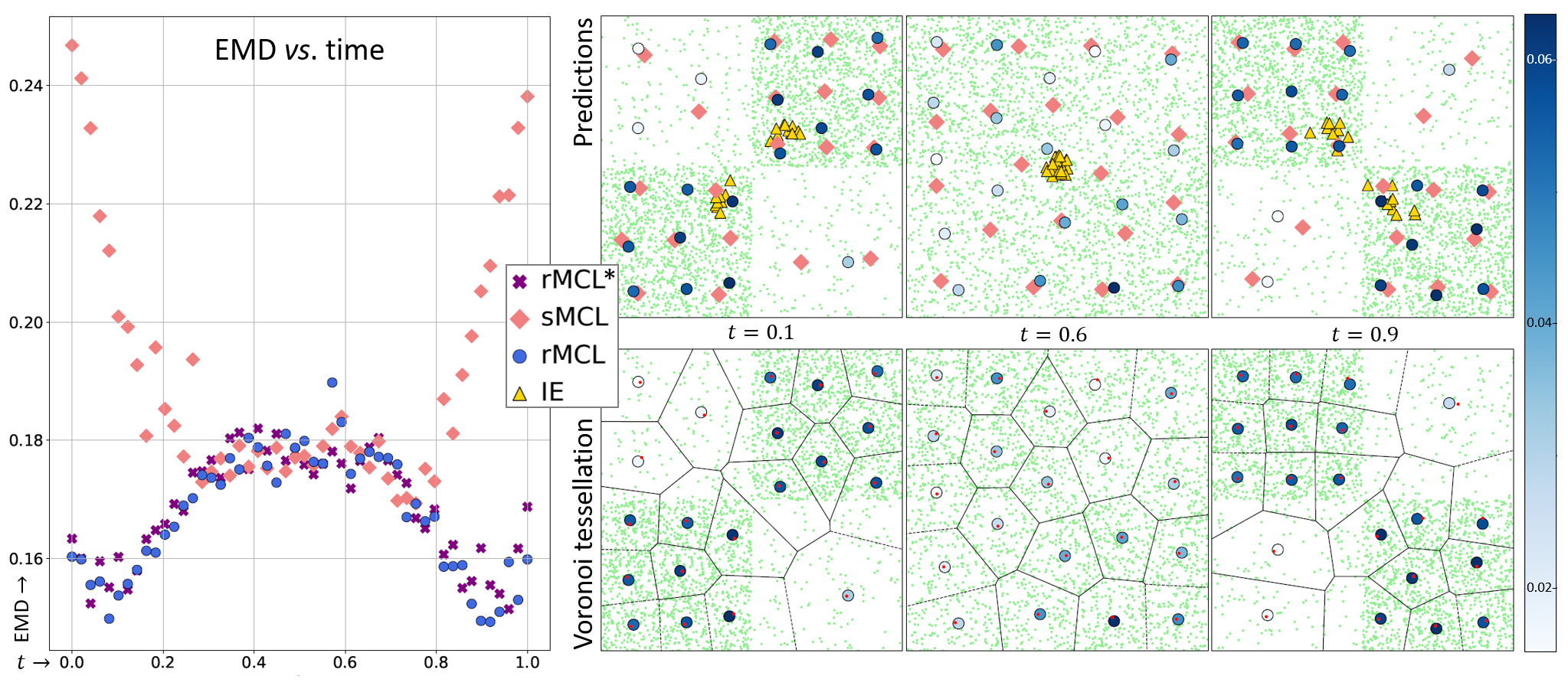
Resilient Multiple Choice Learning: A learned scoring scheme with application to audio scene analysis
Victor Letzelter, Mathieu Fontaine, Mickaël Chen, Patrick Pérez, Slim Essid, and Gaël Richard
Advances in Neural Information Processing Systems (NeurIPS), 2023
Packed Ensembles for efficient uncertainty estimation
Olivier Laurent, Adrien Lafage, Enzo Tartaglione, Geoffrey Daniel, Jean-Marc Martinez, Andrei Bursuc, and Gianni Franchi
International Conference on Learning Representations (ICLR), 2023
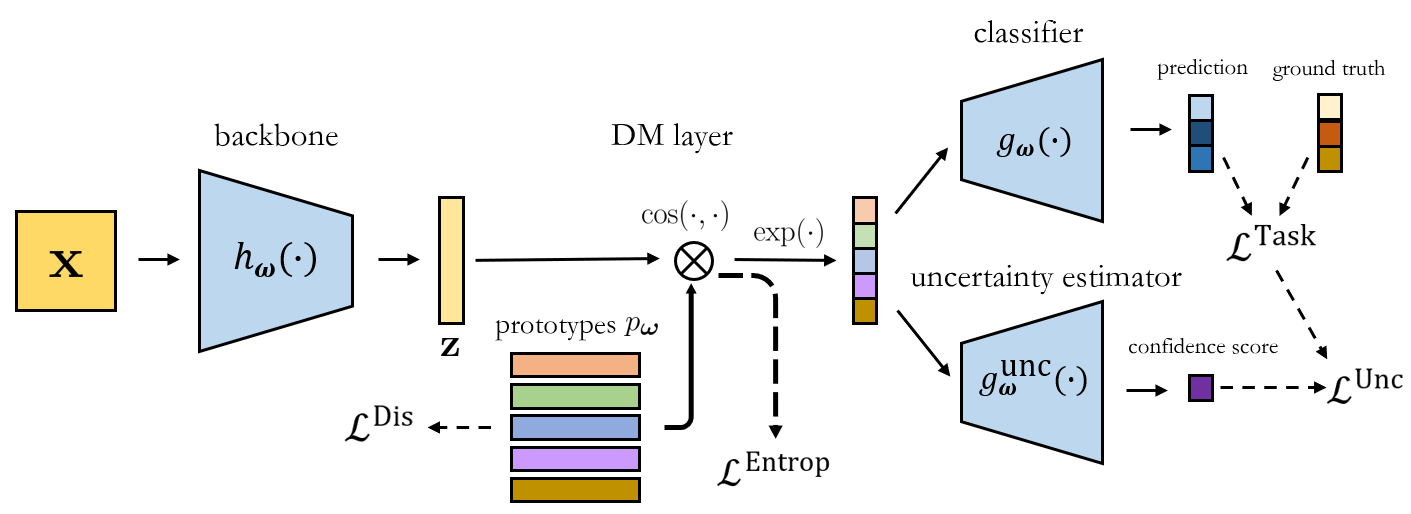
Latent Discriminant deterministic Uncertainty
Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Severine Dubuisson, and David Filliat
European Conference on Computer Vision (ECCV), 2022
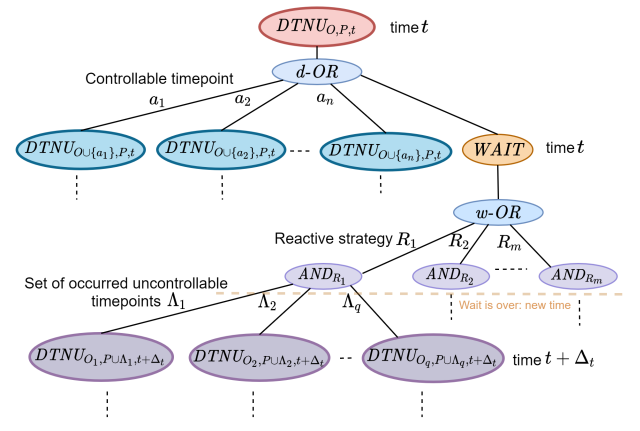
Solving Disjunctive Temporal Networks with Uncertainty under Restricted Time-Based Controllability using Tree Search and Graph Neural Networks
Kevin Osanlou, Jeremy Frank, J. Benton, Andrei Bursuc, Christophe Guettier, Tristan Cazenave and Eric Jacopin
AAAI Conference on Artificial Intelligence (AAAI), 2022
Robust Semantic Segmentation with Superpixel-Mix
Gianni Franchi, Nacim Belkhir, Mai Lan Ha, Yufei Hu, Andrei Bursuc, Volker Blanz, Angela Yao
British Machine Vision Conference (BMVC), 2021
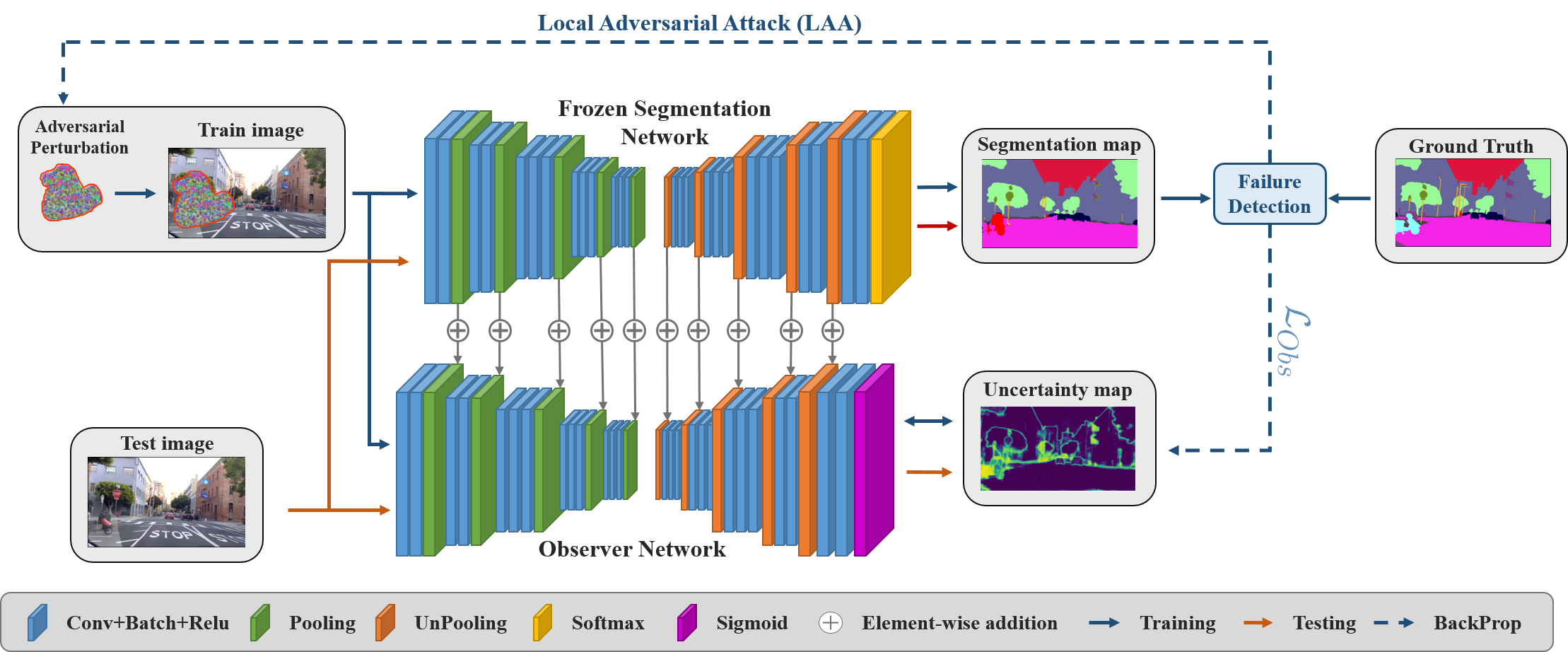
Triggering Failures: Out-Of-Distribution detection by learning from local adversarial attacks in Semantic Segmentation
Victor Besnier, Andrei Bursuc, Alexandre Briot, and David Picard
International Conference on Computer Vision (ICCV), 2021
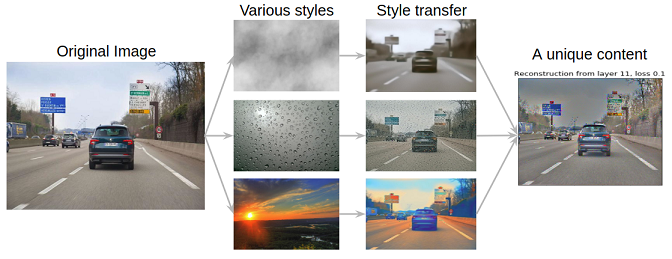
StyleLess layer: Improving robustness for real-world driving
Julien Rebut, Andrei Bursuc, and Patrick Pérez
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021

Confidence Estimation via Auxiliary Models
Charles Corbière, Nicolas Thome, Antoine Saporta, Tuan-Hung Vu, Matthieu Cord, and Patrick Pérez
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2021
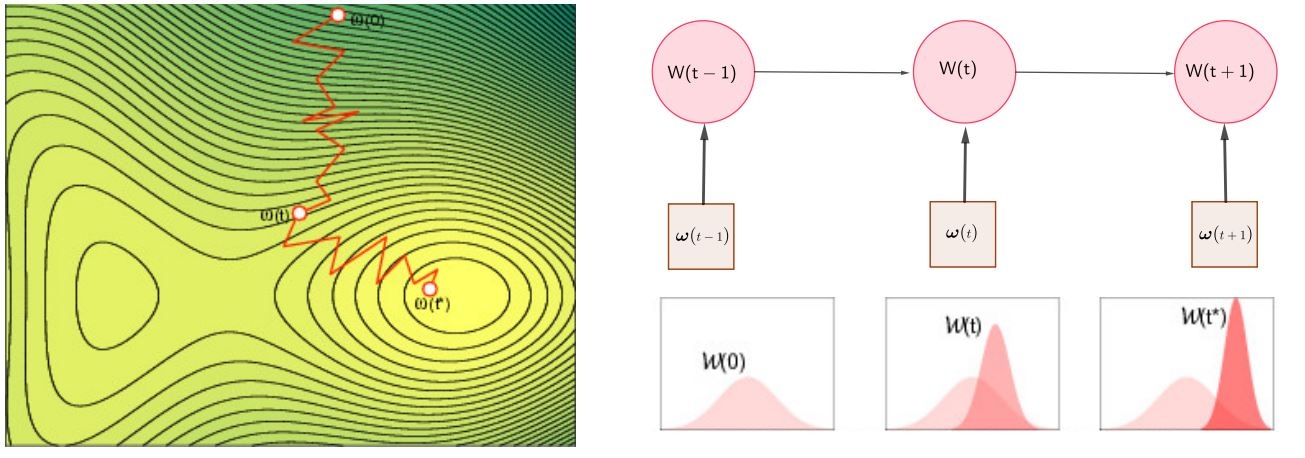
TRADI: Tracking deep neural network weight distributions for uncertainty estimation
Gianni Franchi, Andrei Bursuc, Emanuel Aldea, Severine Dubuisson, and Isabelle Bloch
European Conference on Computer Vision (ECCV), 2020
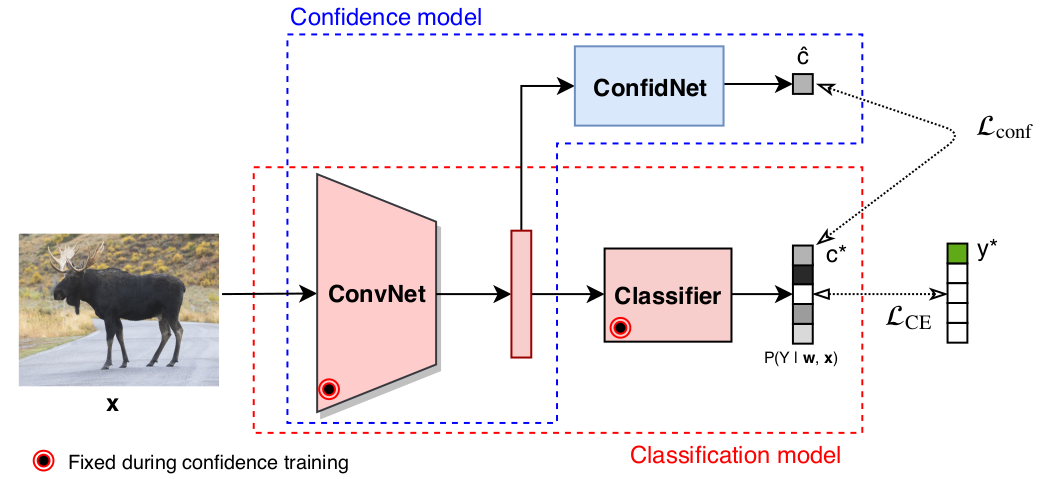
Addressing Failure Prediction by Learning Model Confidence
Charles Corbière, Nicolas Thome, Avner Bar-Hen, Matthieu Cord, and Patrick Pérez
Neural Information Processing Systems (NeurIPS), 2019
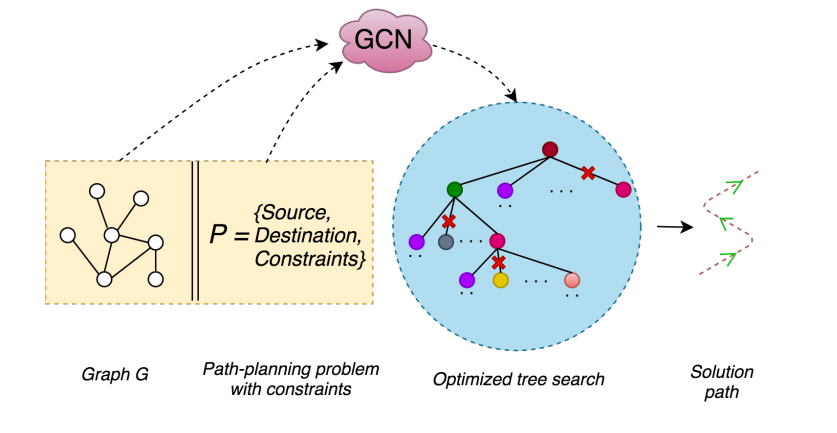
Optimal Solving of Constrained Path-Planning Problems with Graph Convolutional Networks and Optimized Tree Search
Kevin Osanlou, Andrei Bursuc, Christophe Guettier, Tristan Cazenave and Eric Jacopin
International Conference on Intelligent Robots and Systems (IROS), 2019