Diverse Probabilistic Trajectory Forecasting with Admissibility Constraints
Laura Calem Hedi Ben-Younes Patrick Pérez Nicolas Thome
ICPR 2022
Abstract
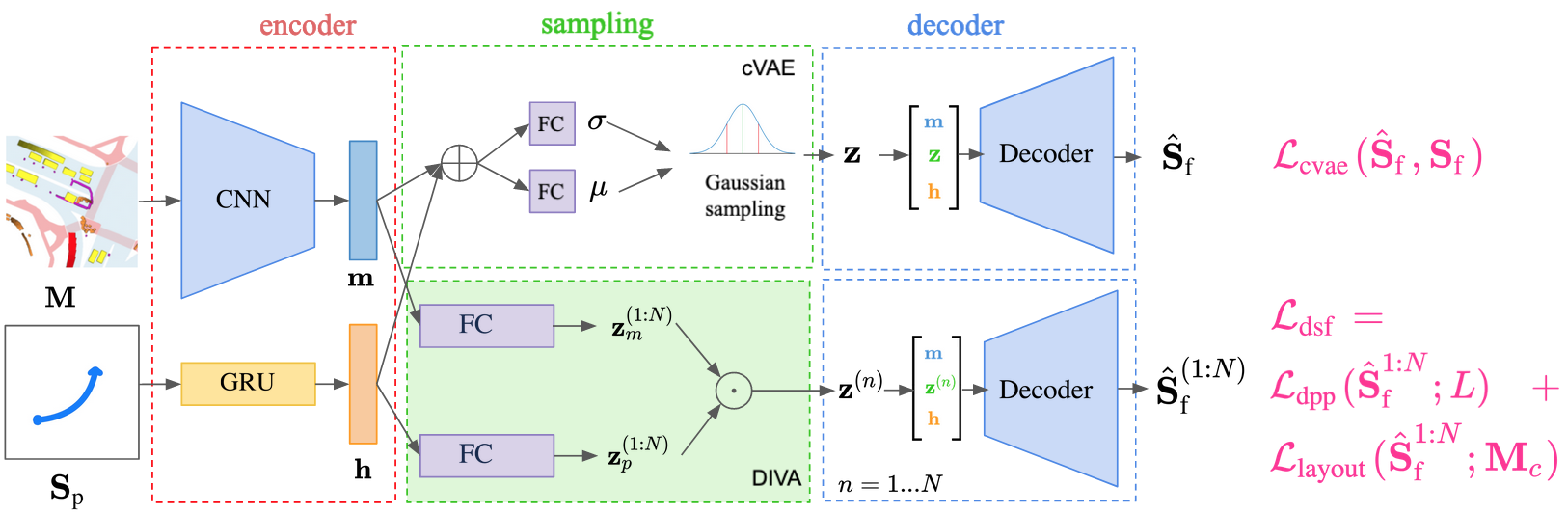
Predicting multiple trajectories for road users is important for driving automation systems: ego-vehicle motion planning indeed requires a clear view of the possible motions of the surrounding agents. However, the generative models used for multiple-trajectory forecasting suffer from a lack of diversity in their proposals. To avoid this form of collapse, we propose a novel method for structured prediction of diverse trajectories. To this end, we complement an underlying pretrained generative model with a diversity component, based on a determinantal point process (DPP). We balance and structure this diversity with the inclusion of knowledge-based quality constraints, independent from the underlying generative model. We combine these two novel components with a gating operation, ensuring that the predictions are both diverse and within the drivable area. We demonstrate on the nuScenes driving dataset the relevance of our compound approach, which yields significant improvements in the diversity and the quality of the generated trajectories.
BibTeX
@inproceedings{calem22diva,
title={Diverse Probabilistic Trajectory Forecasting with Admissibility Constraints},
author={Laura Calem and
Hedi Ben{-}Younes and
Patrick P{\'{e}}rez and
Nicolas Thome},,
booktitle={International Conference on Pattern Recognition (ICPR)}
year={2022}
}