Scalable Surface Reconstruction with Delaunay-Graph Neural Networks
Raphael Sulzer Loic Landrieu Renaud Marlet Bruno Vallet
CGF 2021
Abstract
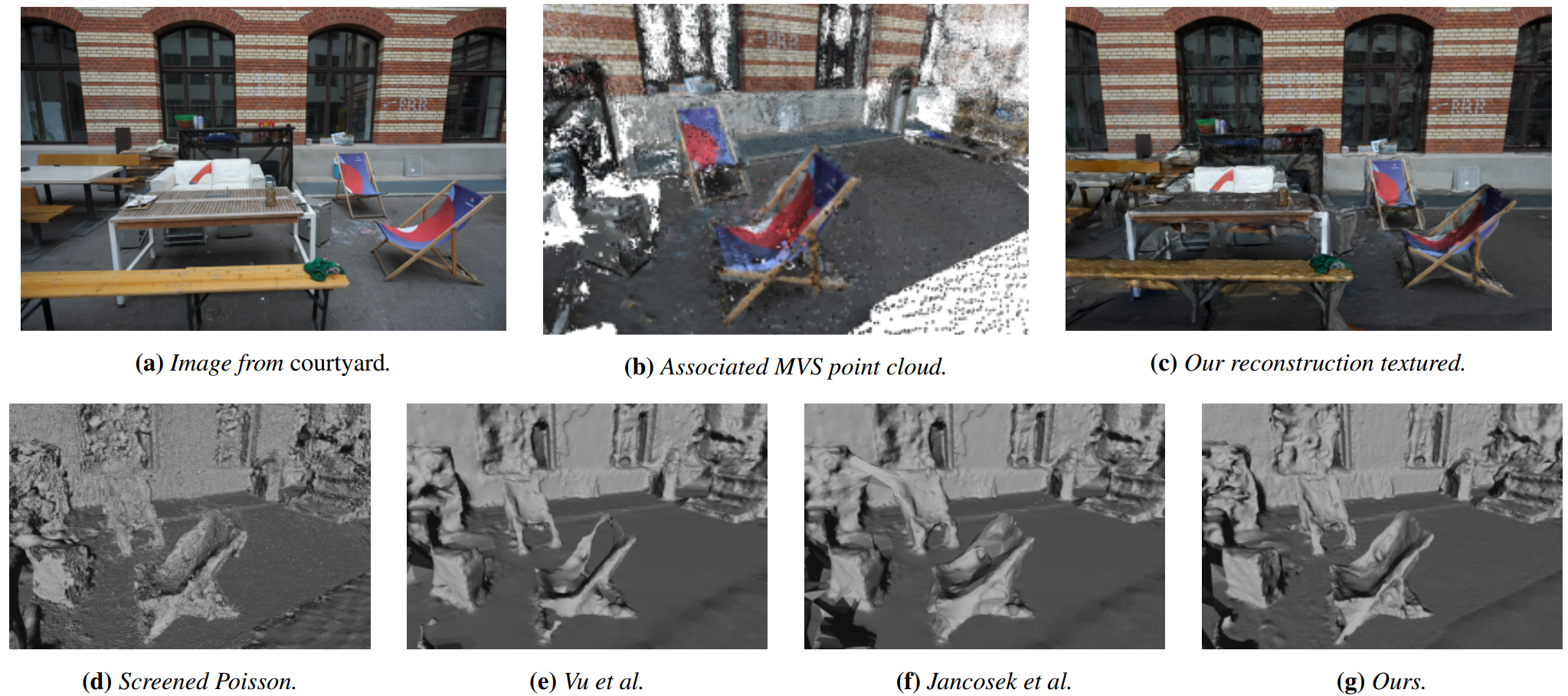
We introduce a novel learning-based, visibility-aware, surface reconstruction method for large-scale, defect-laden point clouds. Our approach can cope with the scale and variety of point cloud defects encountered in real-life Multi-View Stereo (MVS) acquisitions. Our method relies on a 3D Delaunay tetrahedralization whose cells are classified as inside or outside the surface by a graph neural network and an energy model solvable with a graph cut. Our model, making use of both local geometric attributes and line-of-sight visibility information, is able to learn a visibility model from a small amount of synthetic training data and generalizes to real-life acquisitions. Combining the efficiency of deep learning methods and the scalability of energy based models, our approach outperforms both learning and non learning-based reconstruction algorithms on two publicly available reconstruction benchmarks.
Video
BibTeX
@article{sulzer2021dgnn,
author = {Raphael Sulzer and
Lo{\"{\i}}c Landrieu and
Renaud Marlet and
Bruno Vallet},
title = {Scalable Surface Reconstruction with Delaunay-Graph Neural Networks},
journal = {Comput. Graph. Forum},
volume = {40},
number = {5},
pages = {157--167},
year = {2021},
url = {https://doi.org/10.1111/cgf.14364},
doi = {10.1111/CGF.14364},
timestamp = {Tue, 05 Oct 2021 10:01:28 +0200},
biburl = {https://dblp.org/rec/journals/cgf/SulzerLMV21.bib},
bibsource = {dblp computer science bibliography, https://dblp.org}
}