3D sans 3D Scans: Scalable Pre-training from Video-Generated Point Clouds
Ryosuke Yamada Kohsuke Ide Yoshihiro Fukuhara Hirokatsu Kataoka Gilles Puy Andrei Bursuc Yuki M. Asano
CVPR 2026
Abstract
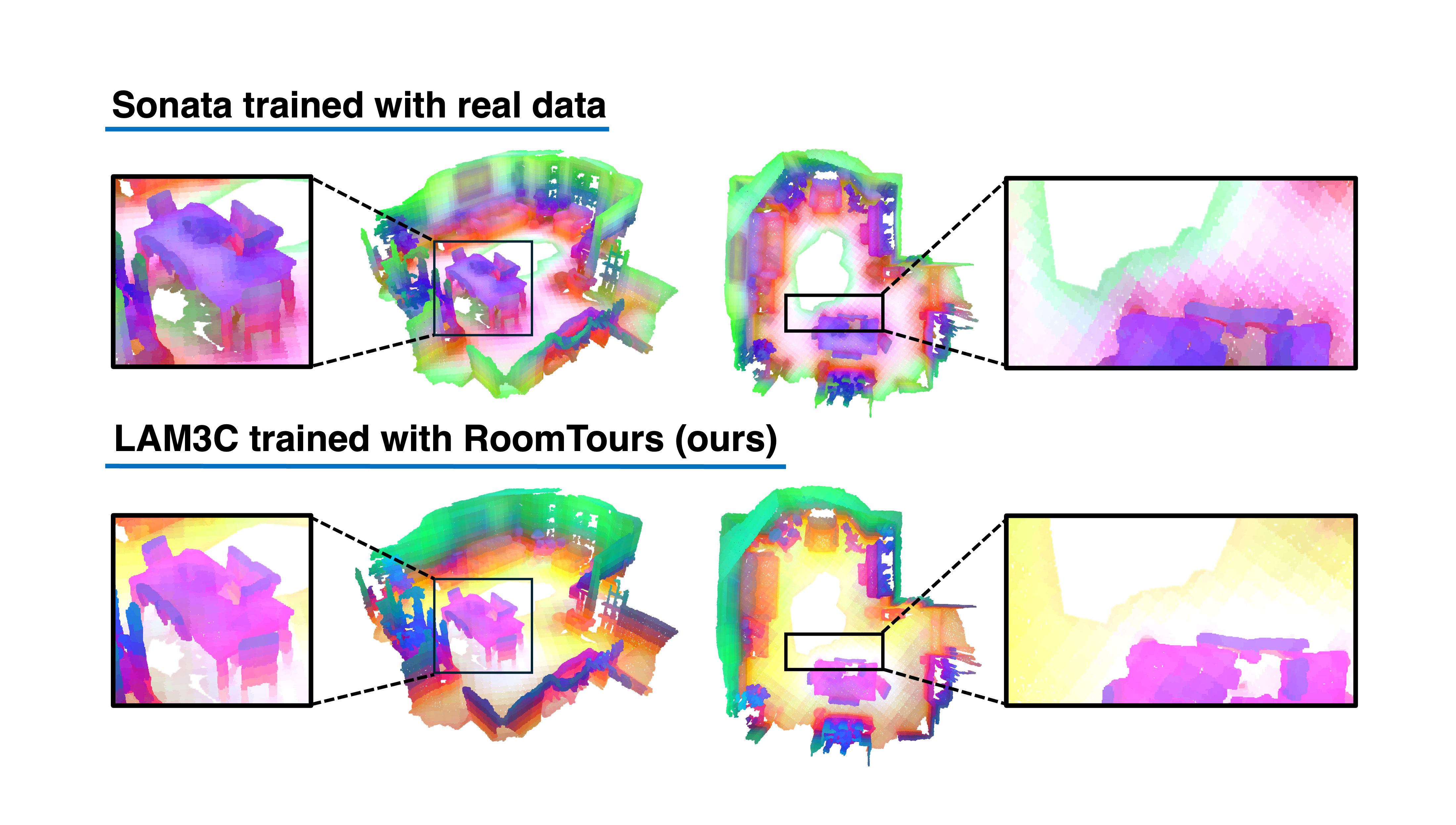
We investigate the use of unlabeled videos for learning 3D representations without ever resorting to a 3D sensor. To this end, we introduce LAM3C, a self-supervised learning framework that operates directly on point clouds reconstructed from video. To support this, we curate RoomTours, a new dataset of 49,219 scenes generated from web-collected room-walkthrough videos using a feed-forward reconstruction model. Pre-training on this video-derived data introduces challenges: noisy geometry and incomplete coverage destabilize standard SSL objectives. We address these by proposing a noise-regularized loss that stabilizes representation learning by enforcing local geometric smoothness and ensuring feature stability under noisy point clouds. Despite never seeing real 3D scans, LAM3C surpasses prior self-supervised methods on indoor semantic and instance segmentation, demonstrating that unlabeled videos are a powerful and scalable resource for 3D self-supervised learning.
BibTeX
@inproceedings{yamada2026lam3c,
title={3D sans 3D Scans: Scalable Pre-training from Video-Generated Point Clouds},
author={Yamada, Ryosuke and Ide, Kohsuke and Fukuhara, Yoshihiro and Kataoka, Hirokatsu and Puy, Gilles and Bursuc, Andrei and Asano, Yuki M.},
booktitle={CVPR},
year={2026}
}