Robustness and uncertainty
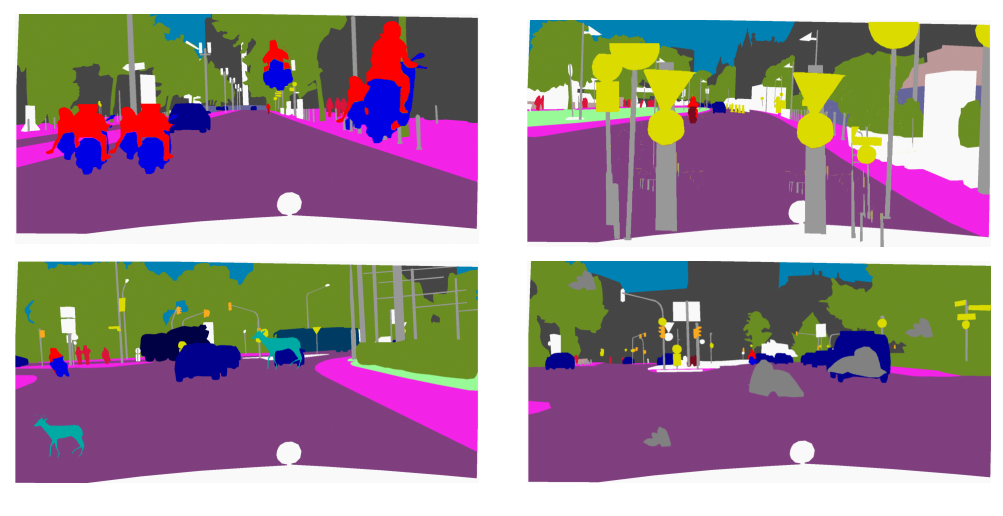
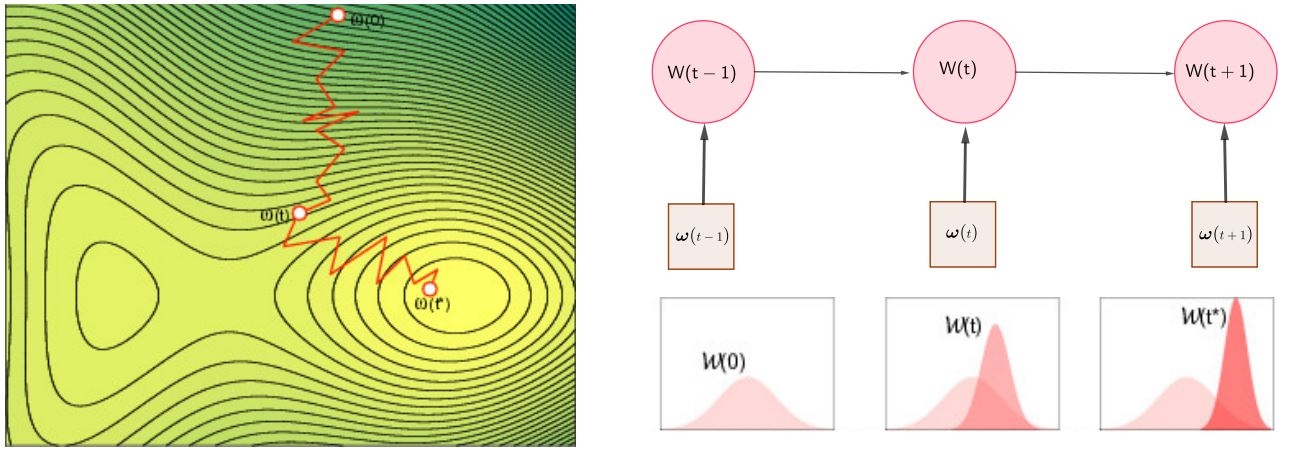
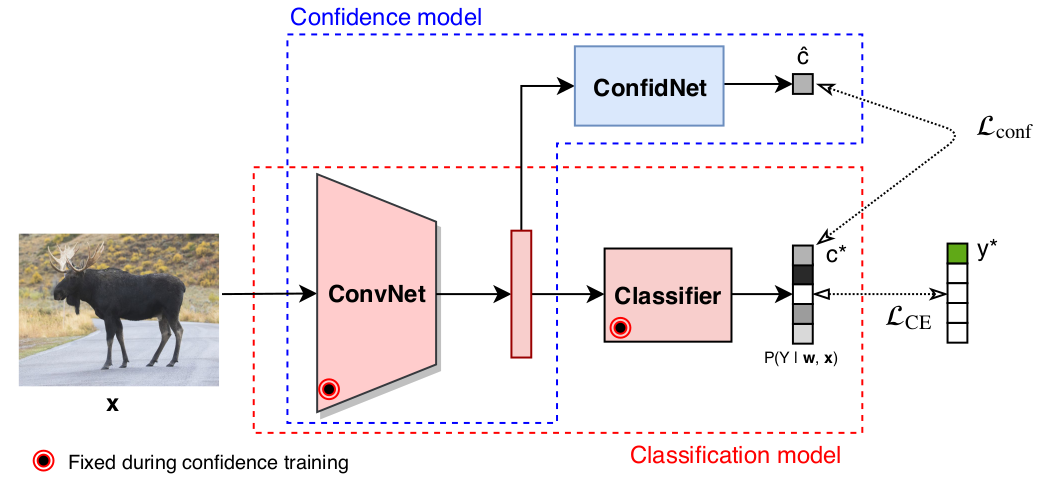
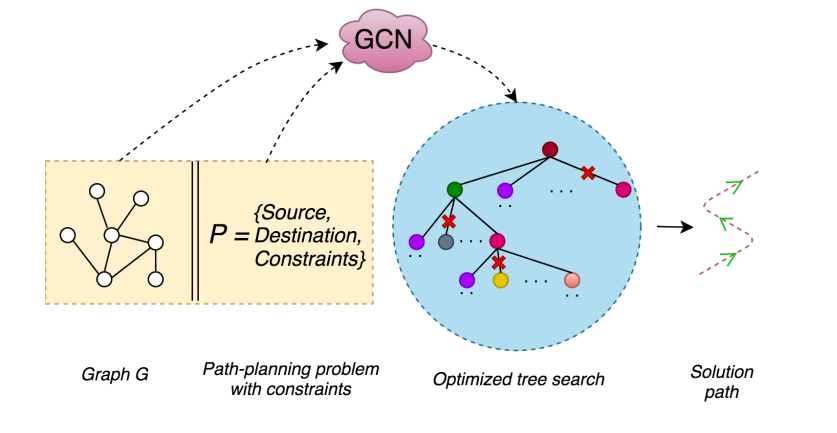
Autonomous vehicles must handle uncertainty and operate reliably under challenging conditions. Our research in uncertainty and robustness focuses on developing models that can accurately estimate their own uncertainty and maintain resilience against noisy or adversarial inputs
Selected publications
2026
2025
2024
-
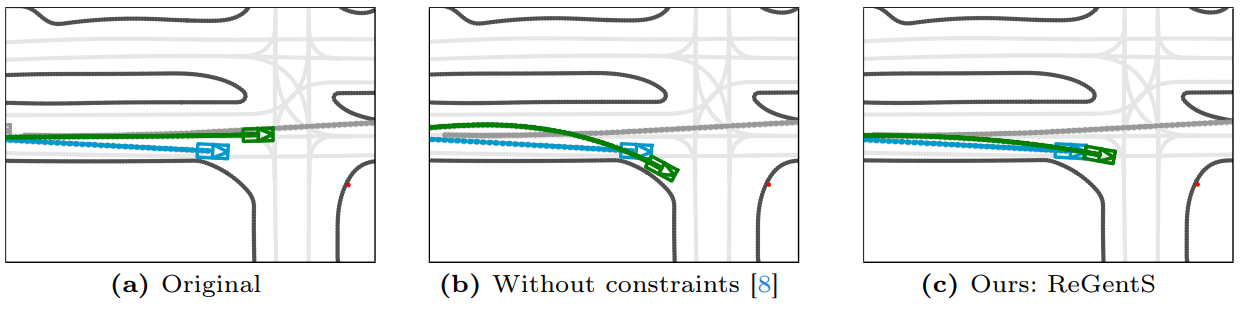 ECCV Workshop W-CODA 2024
ECCV Workshop W-CODA 2024 2023
2022
2021
-

2020
2019
No publications match your filters.