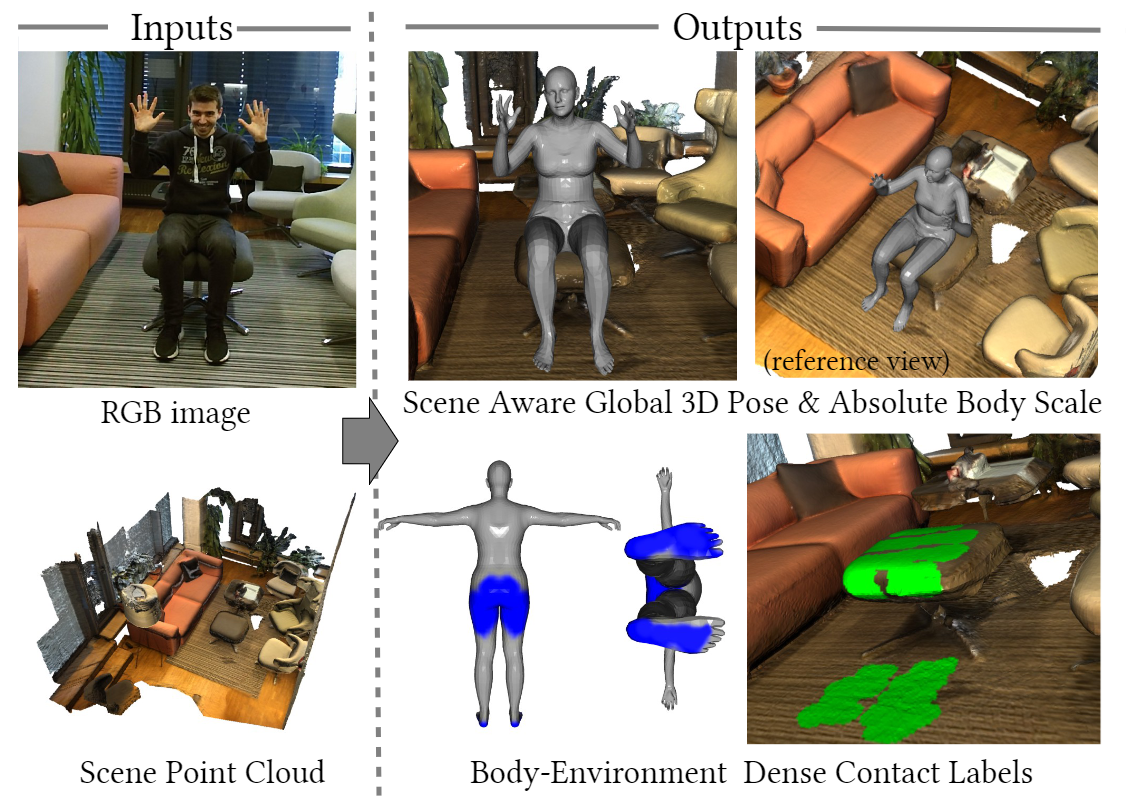
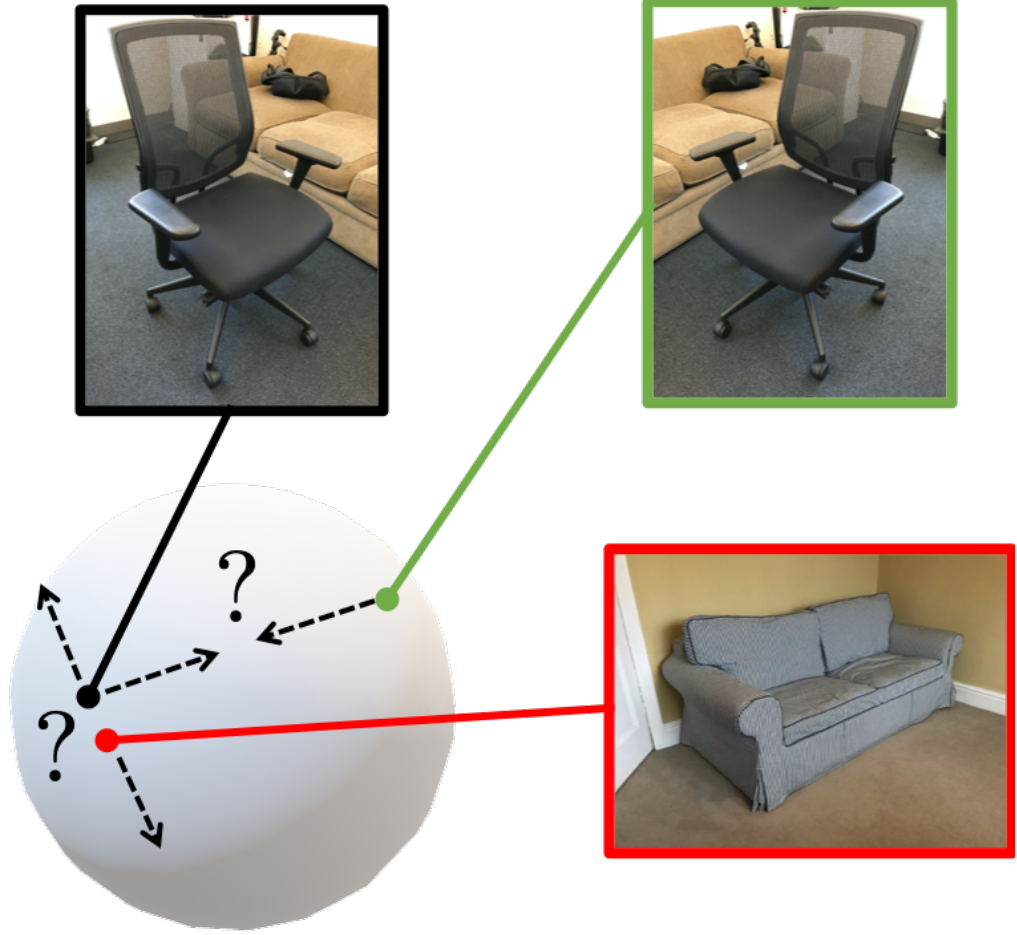
Pose estimation
Precise determination of an object's position, orientation, and dimensions in 3D space is vital for autonomous driving.
Selected publications
2025
2024
-
2023
2022
2021

No publications match your filters.
Precise determination of an object's position, orientation, and dimensions in 3D space is vital for autonomous driving.