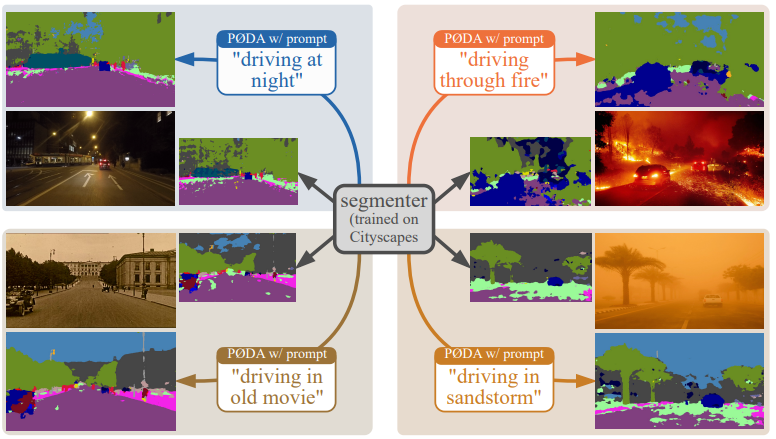
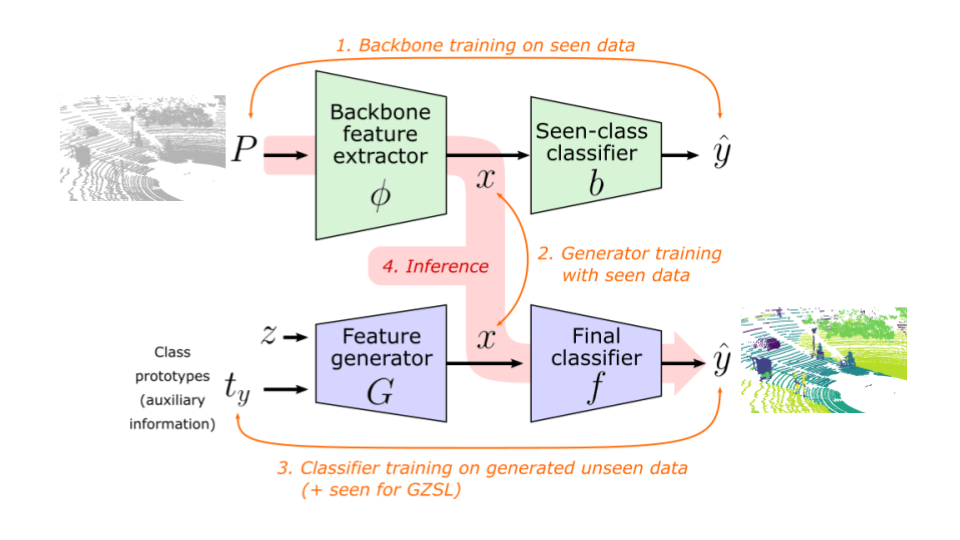
Zero-shot and open-world learning
Our research in open-world perception focuses on developing models capable of recognizing and adapting to novel objects and scenarios, ensuring safe and reliable performance in the ever-changing real world.
Selected publications
2025
2024
2023
2021
2019
-

No publications match your filters.