Model and domain generalization
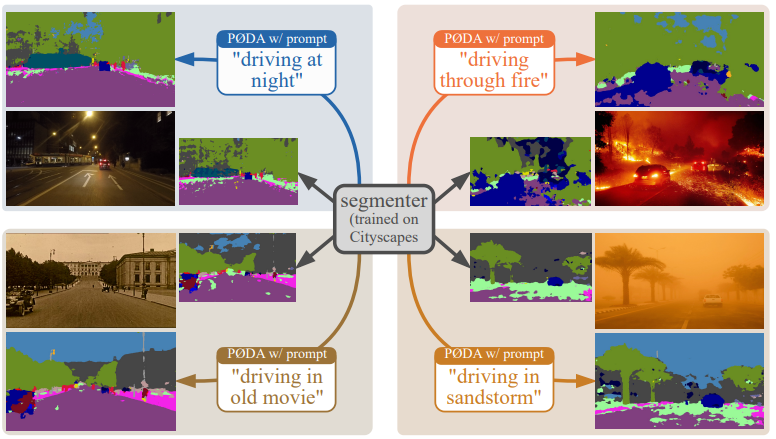
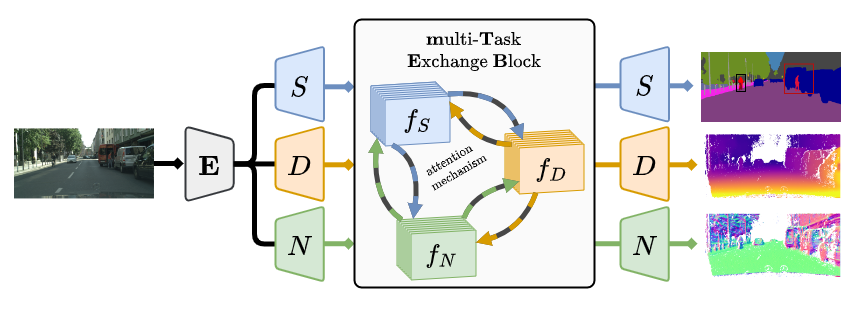
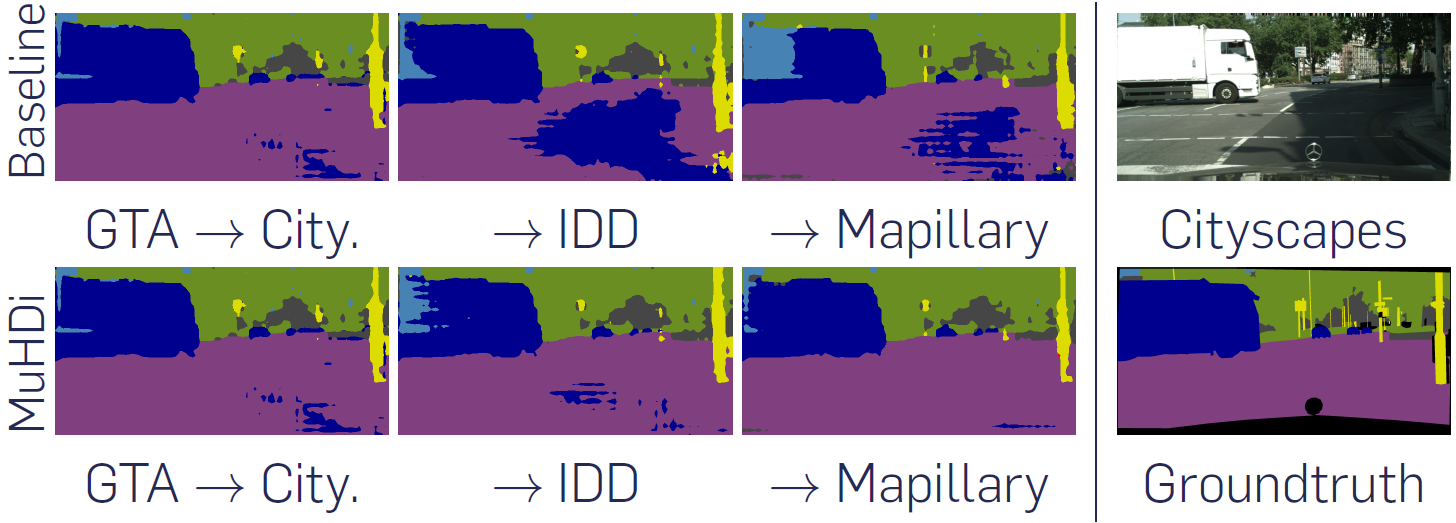
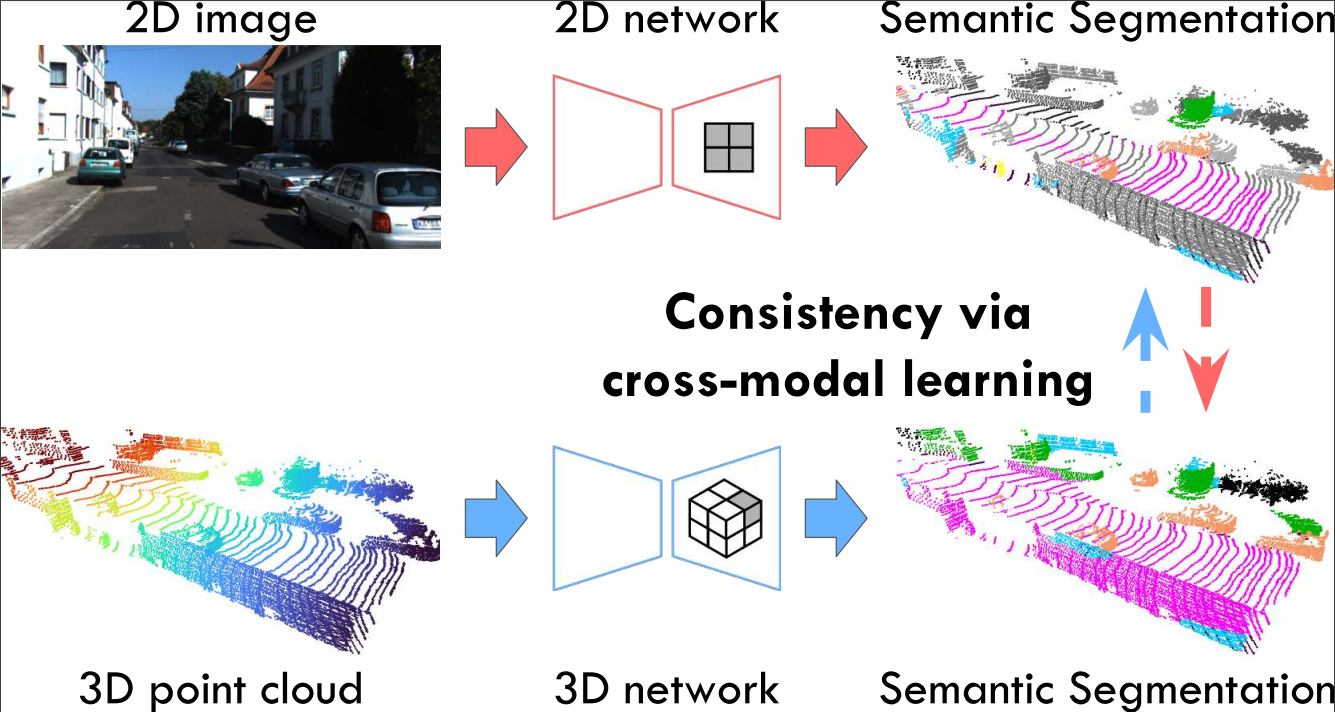
Autonomous vehicles must perform well in diverse and unseen environments. Our research in generalization and domain adaptation focuses on developing models that can effectively transfer their knowledge from familiar to unfamiliar environments, ensuring reliable performance in various real-world conditions.
Selected publications
2025
-
 CoRL Workshop 2025
CoRL Workshop 2025 2024
2023
2022
2021
-

2020
2019
No publications match your filters.