Domain adaptation
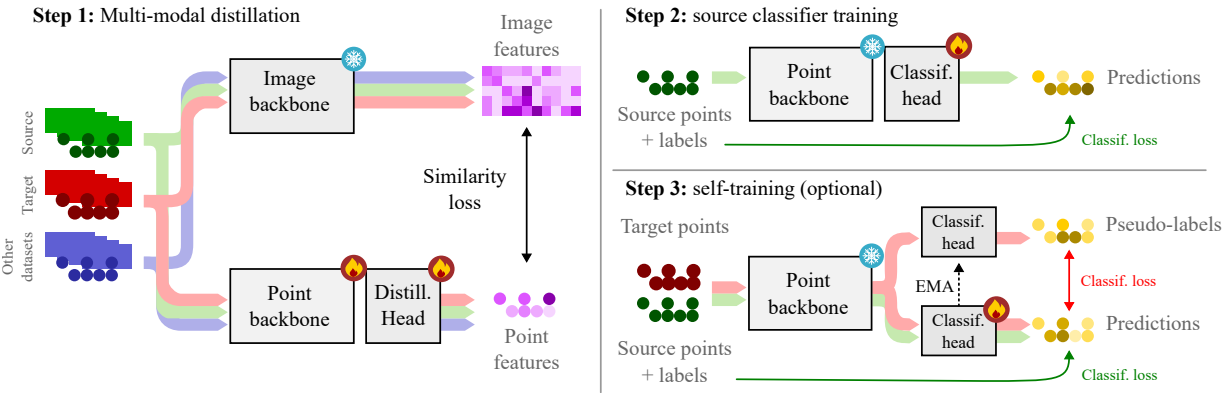
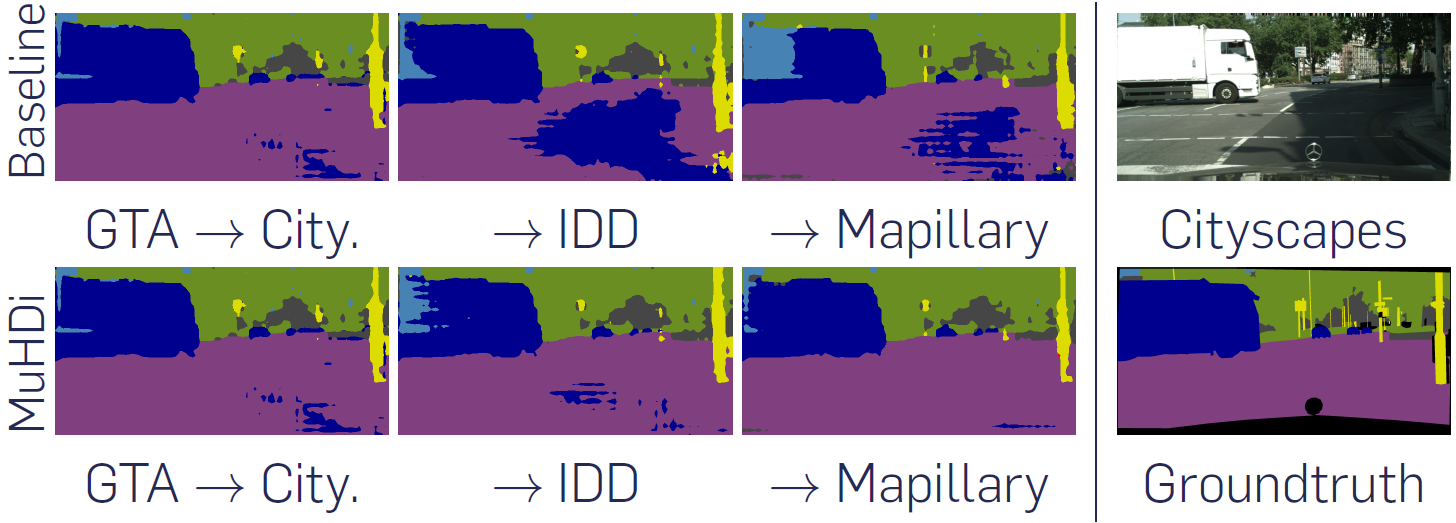
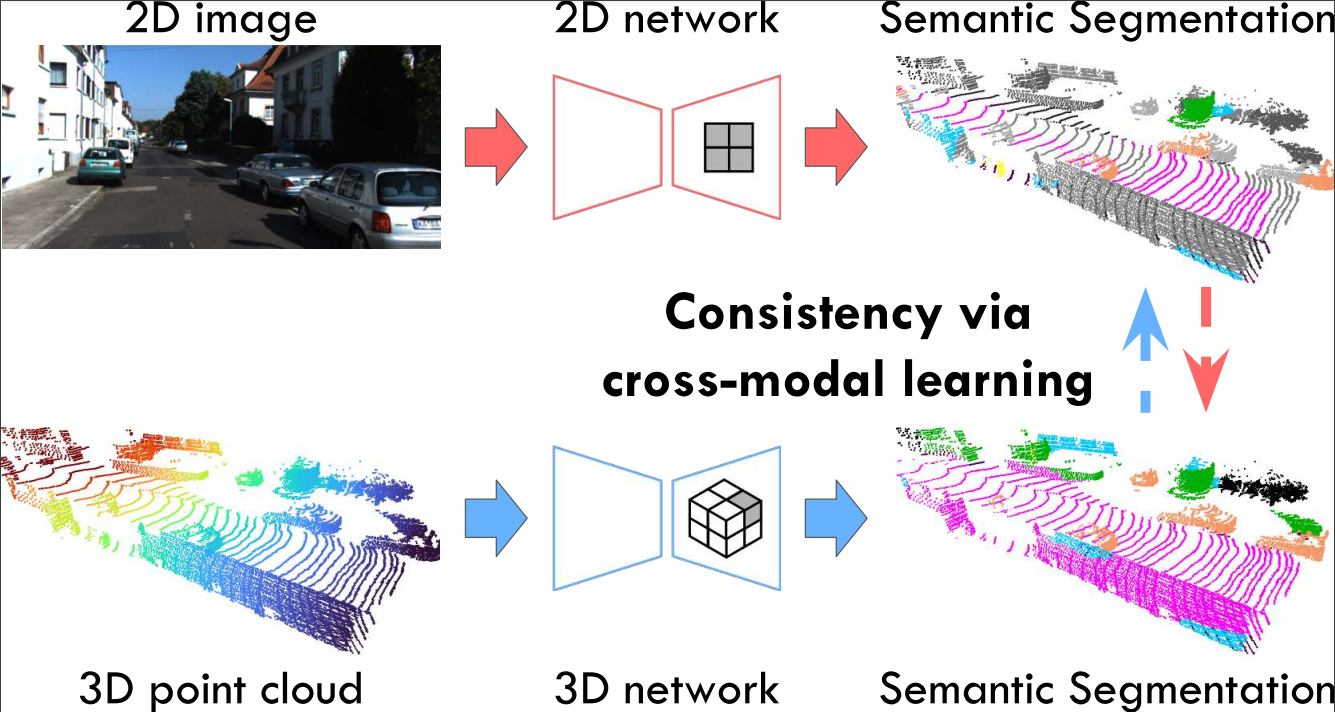
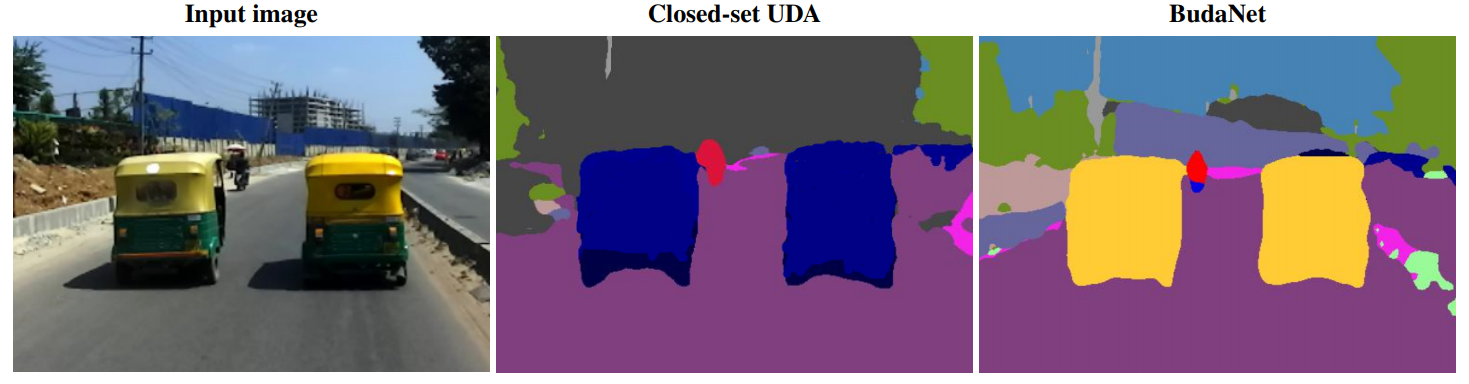
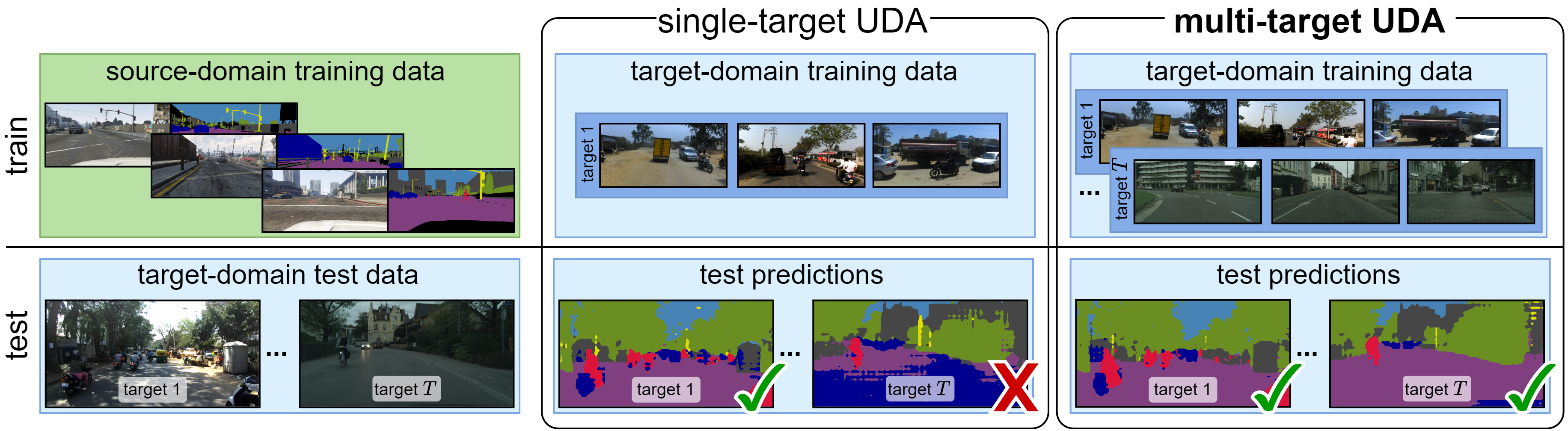
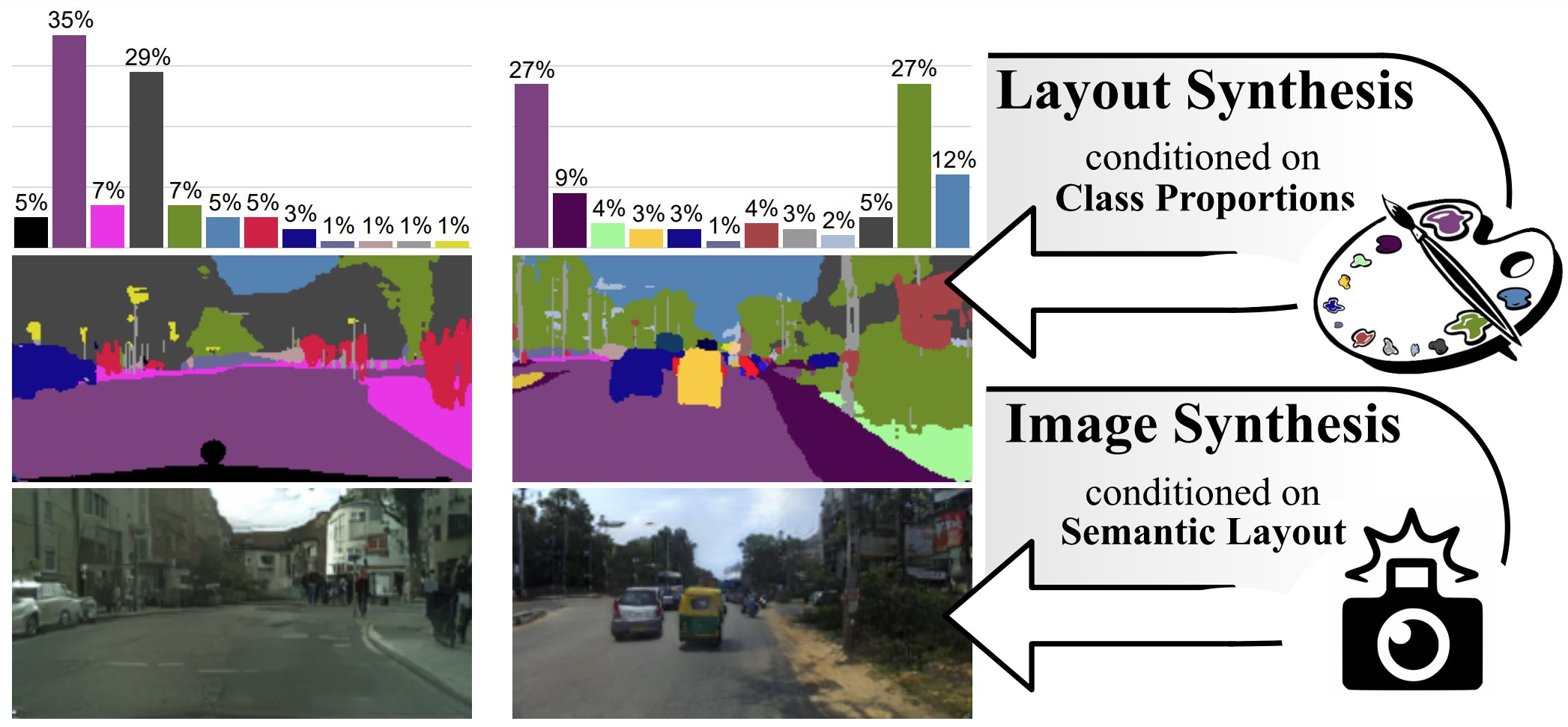
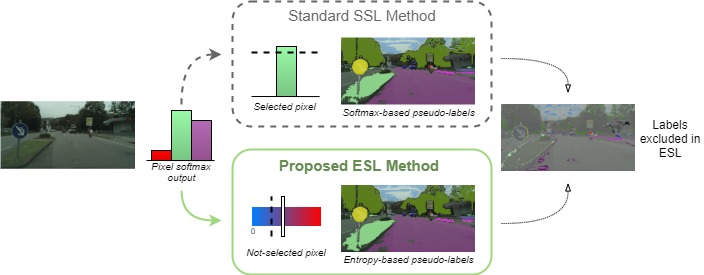
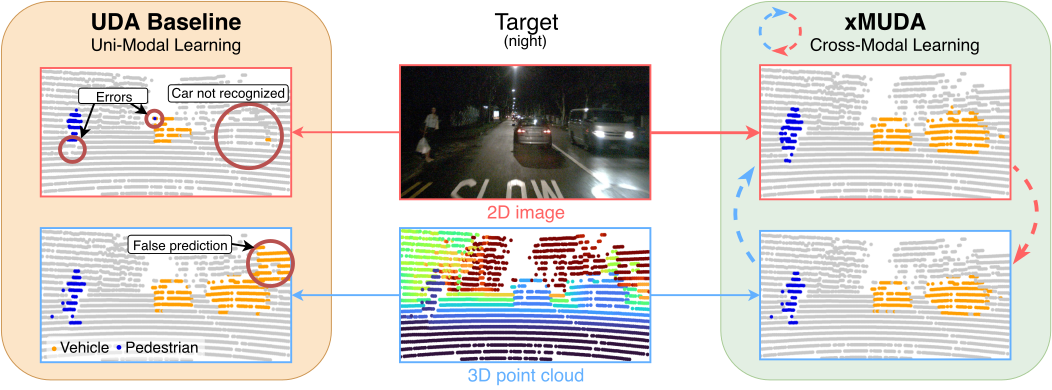
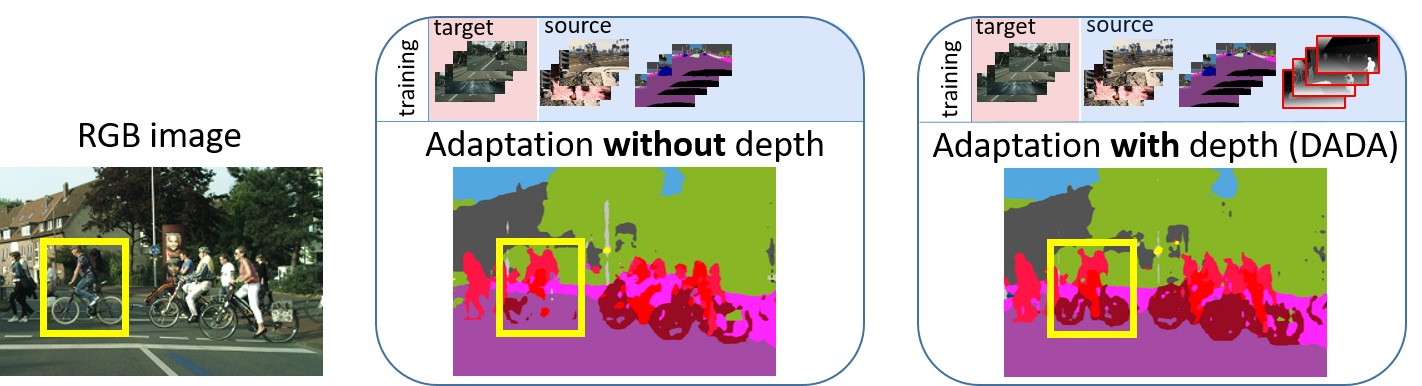
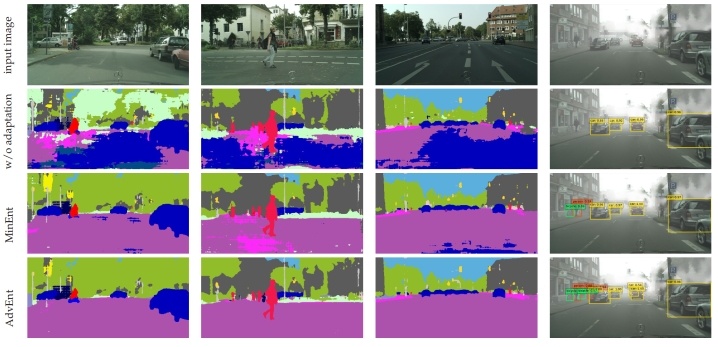
Deep learning and reinforcement learning are key technologies for autonomous driving. One of the challenges they face is to adapt to conditions which differ from those met during training. To improve systems’ performance in such situations, we explore so-called “domain adaptation” techniques, as in AdvEnt at CVPR’19 and DADA its extension at ICCV’19. We propose new solutions to more practical DA scenarios in MTAF (ICCV'21) to handle multiple target domains and in BUDA (CVIU'21) to handle new target classes. In xMUDA (CVPR'20), we introduce a new framework to tackle the challenging adaptation problem on both 2D image and 3D point-cloud spaces.
Selected publications
2025
2024
2023
2022
2021
-

2020
2019
No publications match your filters.